

An on-orbit calibration method for image plane errors of six degrees of freedom for star sensors
A technology of star sensor and calibration method, which is applied in the directions of instruments, measuring devices, astronomical navigation, etc., can solve the problems of six-degree-of-freedom image plane error, satellite attitude determination error, satellite star sensor image plane error, etc., and achieve attitude determination. The effect of improving the accuracy, improving the control accuracy, and eliminating the image plane error of the star sensor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 2
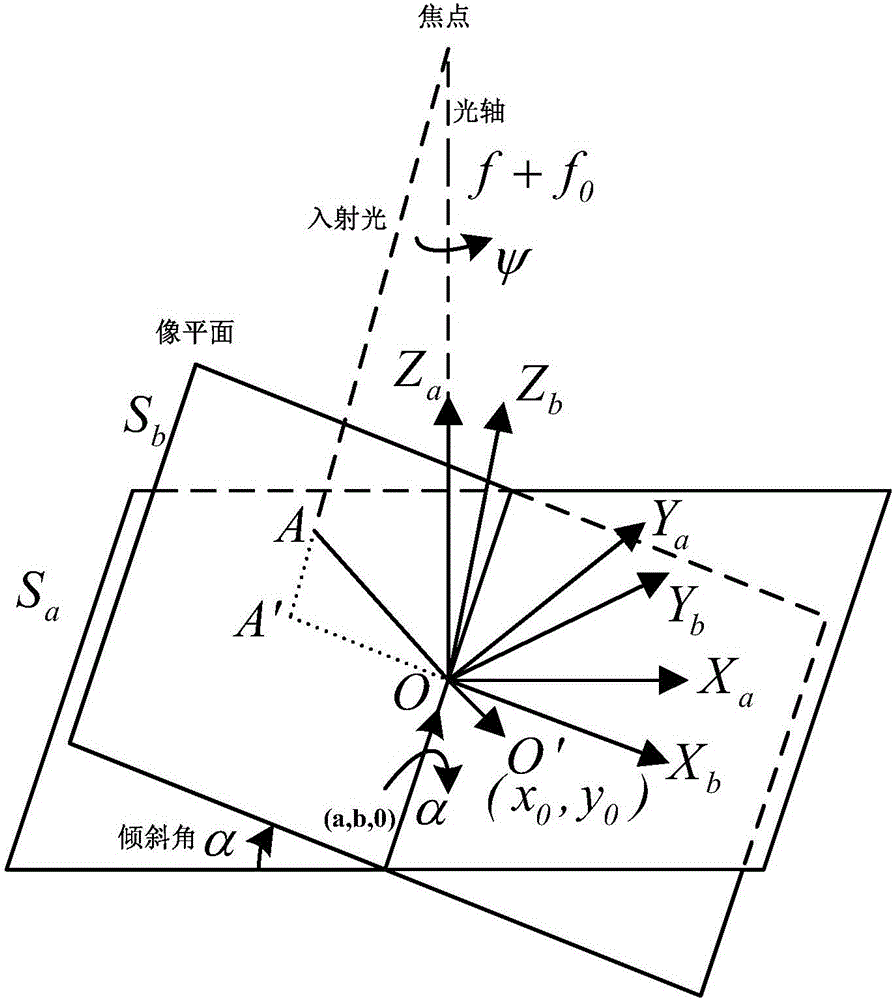
[0026] Specific embodiment two: this embodiment is a further description of specific embodiment one, the star sensor in step one obtains the imaging point coordinates (x, y, f) under the star sensor coordinate system to the target star imaging, where x , y are the coordinates of the imaging point in the x and y directions, and f is the focal length of the star sensor lens.
specific Embodiment approach 3
[0027] Specific embodiment three: This embodiment is a further description of specific embodiment one. In step two, the error coefficient and error correction formula in the six-degree-of-freedom image plane error model of the star sensor are introduced, wherein the star sensor six-degree-of-freedom image plane The error coefficient is (a,α,ψ,x 0 ,y 0 , f 0 ), the original size of the error coefficient is obtained through ground experiments; the correction formula for the six-degree-of-freedom image plane error of the star sensor is:
[0028] x ′ = f + f 0 f + f 0 - ...
specific Embodiment approach 4
[0031] Embodiment 4: This embodiment is a further description of Embodiment 1. In step 3, the coordinates of the imaging point of the target star after error correction are converted into the unit direction vector W of the target star in the star sensor coordinate system, specifically The expression is as follows:
[0032] W = 1 x ′ 2 + y ′ 2 + ( f - f 0 ) 2 - x ′ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More