

Lander soft landing posture control method
A technology of attitude control and lander, which is applied in the soft landing attitude control of the lander, and the landing attitude control field of the lander during the soft landing, which can solve the problems of attitude over-tolerance and poor control accuracy, so as to avoid measurement saturation and misdiagnosis The situation and method are simple and reliable
Active Publication Date: 2015-04-22
BEIJING INST OF CONTROL ENG
View PDF3 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The disadvantage of the above attitude control algorithm is that when there is a constant disturbance torque in the system, the attitude angle is stable near the attitude dead zone, and the control accuracy is poor.
The disadvantage of the above attitude tolerance judgment algorithm is that when the angle and angular velocity are in the opposite direction and are large, the attitude tolerance is obvious, but the algorithm cannot determine the attitude tolerance fault
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
[0053] (1) Lander inertia J=2000kgm 2 , ω=1rad / s, ξ=0.7, then: Kp=2000, Kd=2800, Ki=100, Kpv=2800, Kiv=500.
[0054] (2) Attitude control thruster moment Y max =240Nm, minimum pulse width t min =0.04s, attitude control accuracy θ min =0.2°, then: design Tm=2, H1=0.03, H2=0.01.
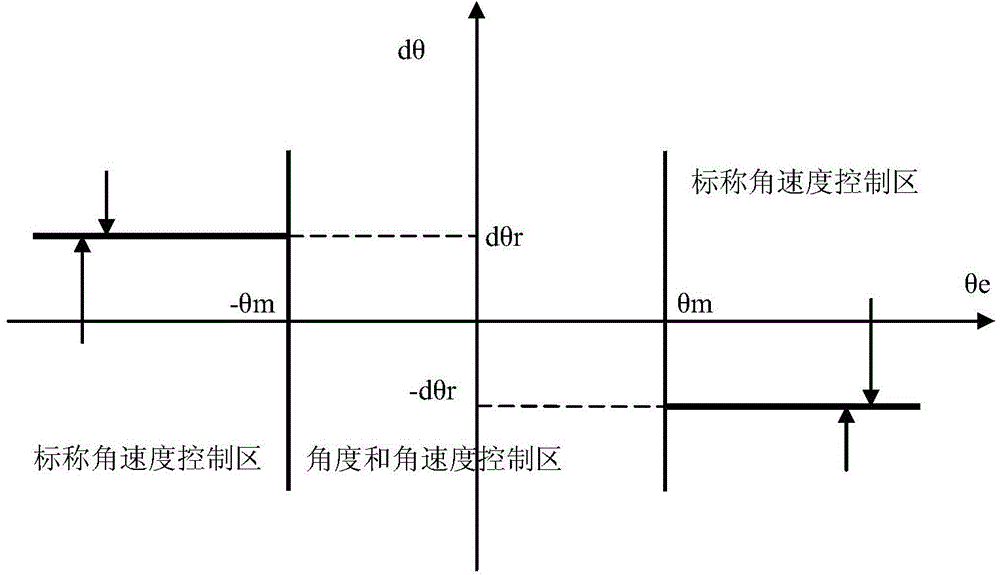
[0055] (3) Maximum capability of angular velocity measurement ω max =6° / s, then: dθr=3° / s, θm=4.2°.
[0056] (4) According to the above control parameters, dθg=3° / s and θeg=4° are obtained under the normally open fault of a thruster, then: design θ AF1 =3°, θ AF2 =9°, dθ AF1 =-1° / s, dθ AF2 =6° / s.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
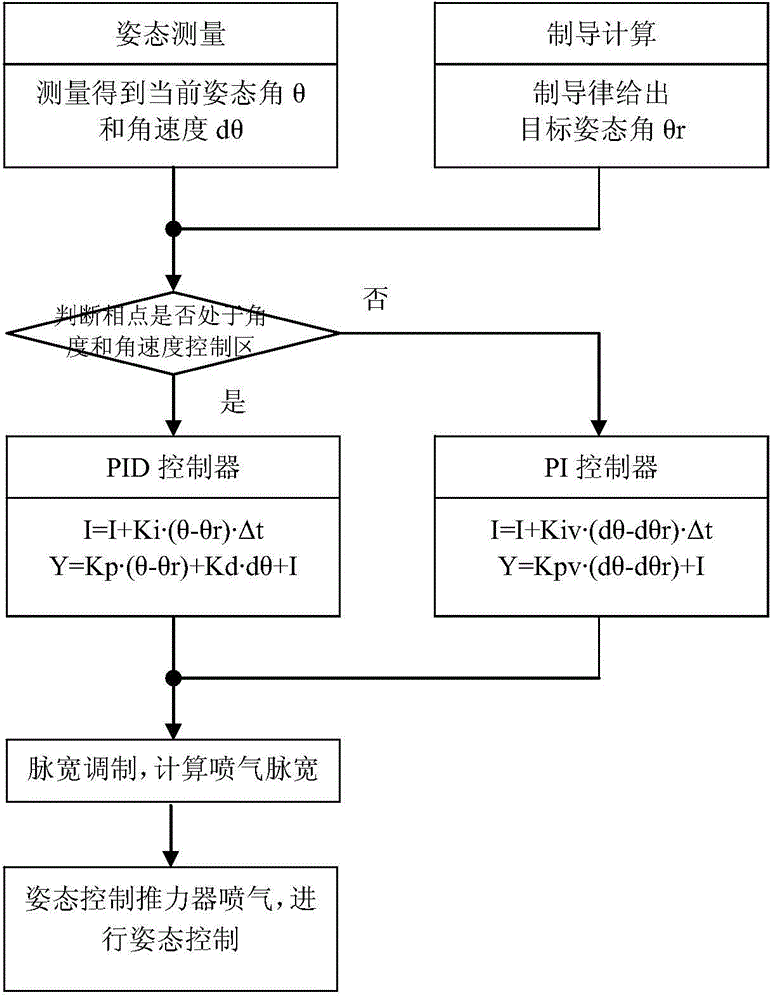
The invention discloses a lander soft landing posture control method. The method includes when posture of a target changes greatly, designing PI (proportion integration) control on the basis of nominal angular speed, and when the posture quickly approaches the target, avoiding angular speed measuring saturation; when angular speed deviation decreases, directly assigning an integral term to angular speed deviation PID (proportion integration differentiation) control by disturbance moment estimated by the integral term, and controlling switching to realize smooth transition. The lander soft landing posture control method adapts to the characteristic of changing of the disturbance moment during soft landing of a lander, so that steady-state posture control accuracy is improved; on the basis of the posture control method and aiming at the characteristic of posture jumping of a guided target during soft landing, a posture out-of-tolerance judging method is designed, so that misdiagnosis caused by conventional methods is avoided. The lander soft landing posture control method is simple, reliable and high in fault positioning accuracy rate.
Description
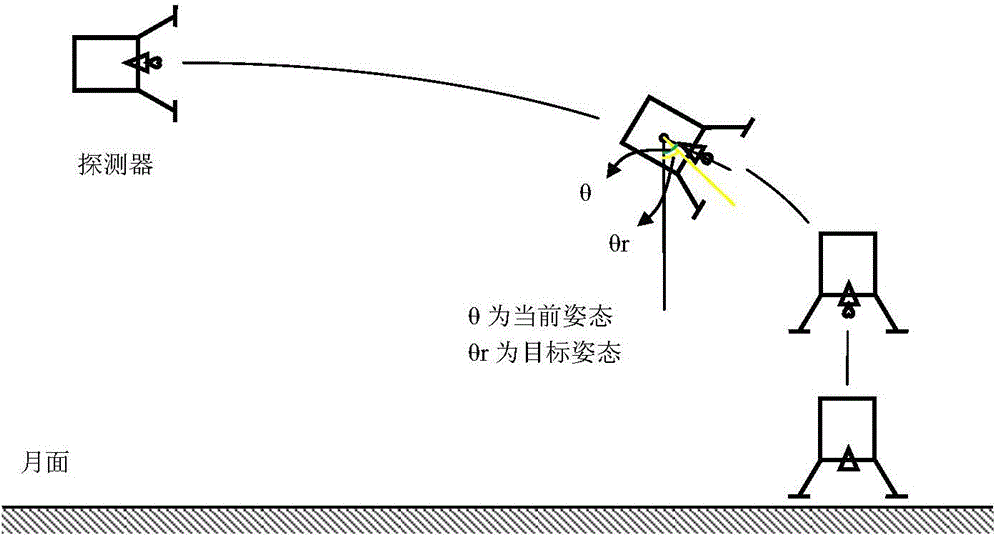
technical field [0001] The invention relates to a soft landing attitude control method of a lander, in particular to a landing attitude control method of a lander during a soft landing, and belongs to the technical field of spacecraft attitude control. Background technique [0002] The attitude maneuver diagram of the probe during soft landing is as follows: figure 1 As shown, the guidance system gives the target attitude according to the position and velocity information of the probe, and the attitude control system determines the given current attitude according to the attitude, controls the probe to tend to the target attitude, and finally lands vertically on the surface of the moon. [0003] The Apollo lunar probe and the new generation of lunar probes in the United States adopt the phase plane control method for attitude control, such as the article "A Parameterized Approach to the Design of Lunar Lander Attitude Controllers" published by Michael C. Johnson in 2006, AIA...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G05B17/02B64G1/24
Inventor关轶峰张洪华黄翔宇李骥王鹏基张晓文梁俊于萍程铭赵宇
OwnerBEIJING INST OF CONTROL ENG