Gravity compensation method for flexible follow-up control of spacecraft manipulator
A technology of gravity compensation and mechanical arm, applied in manipulators, manufacturing tools, etc., can solve the problems of manual installation of parts and components, difficult to control the installation accuracy, difficult to manually install parts and other problems, and achieve the effect of solving the problem of gravity compensation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
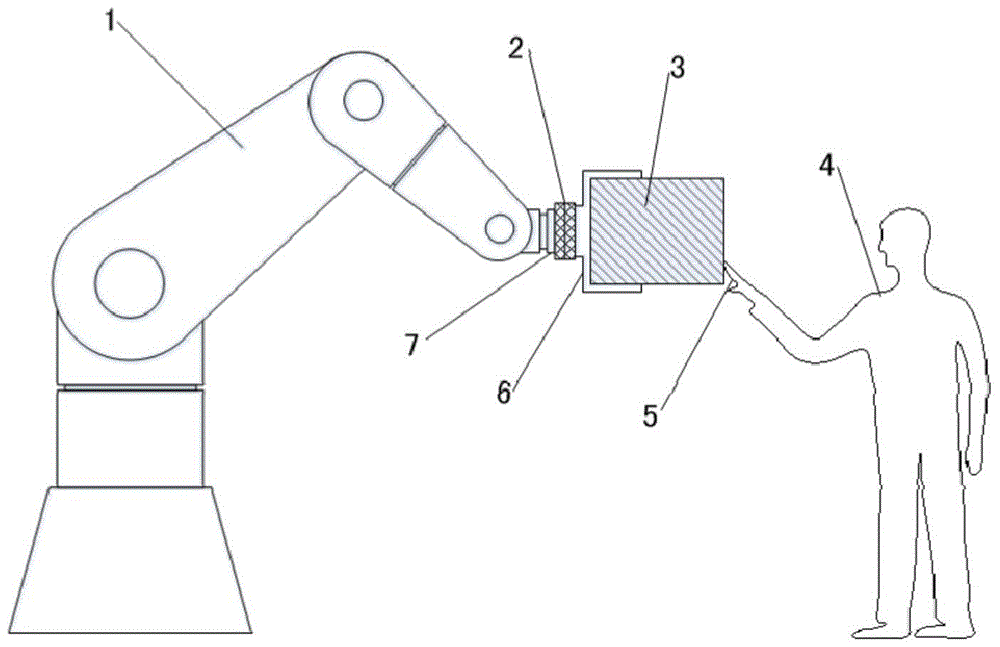
[0031] like figure 1 As shown, in the robotic arm flexible follow-up control system used in the gravity compensation method of the present invention, the six-dimensional force sensor 2 is installed between the end flange 7 of the robotic arm 1 and the fixture 6, and the six-dimensional force sensor is an industry-leading Well-known and mature sensor products, which are easy to buy (such as ATI's six-dimensional force sensor), are clamped by the operating part 3 and clamp 6, and the operating part 3 and the clamp 6 together constitute the load of the six-dimensional force sensor 2 , the load gravity is G, the direction is vertical downward, the operator 4 pushes the operated part 3 with his hand 5, and the force exerted on the operated part is Fh.
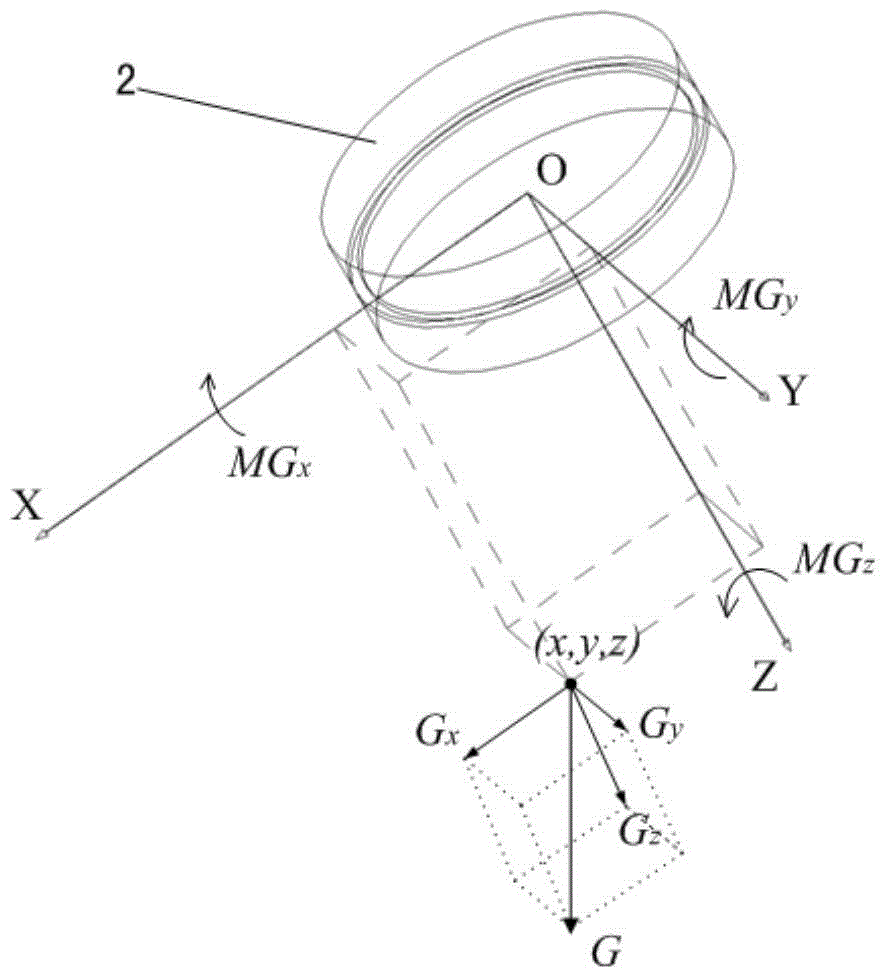
[0032] The force and torque information detected by the six-dimensional force sensor 2 is the result of the joint action of the load gravity G and the force Fh of the hand 5. To realize the flexible follow-up control of the robot ar...
Embodiment approach 2
[0048] The difference between the present embodiment and the first embodiment lies in the calculation method of the load gravity G and the coordinates of the center of gravity (x, y, z).
[0049] When the end of the fixed robot arm 1 is in any posture, and the load has no external force, the force components measured by the six-dimensional force sensor 2 are Fx0, Fy0, Fz0, and the moment components are Mx0, My0, Mz0, then:
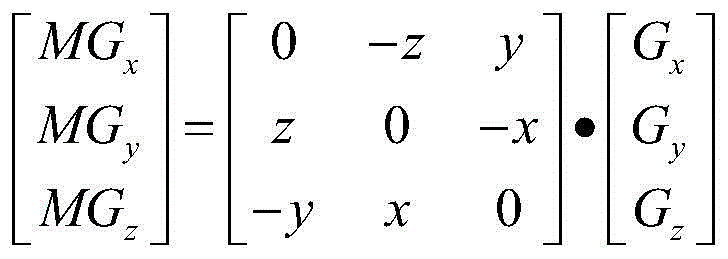
[0050] Mx0=Fz0×y-Fy0×z
[0051] My0=Fx0×z-Fz0×x
[0052] Mz0=Fy0×x-Fx0×y
[0053] Adjust the posture of the end of the robot arm 1 so that the Y axis of the coordinate system of the six-dimensional force sensor 2 points to the direction of gravity. At this time, when the load has no external force, the force components measured by the six-dimensional force sensor 2 are Fx1, Fy1, Fz1 , the moment components are Mx1, My1, Mz1, which also satisfy:
[0054] Mx1=Fz1×y-Fy1×z
[0055] My1=Fx1×z-Fz1×x
[0056] Mz1=Fy1×x-Fx1×y
[0057] Since the Y-axis of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More