Gravity Compensation Device for Space Manipulator with Two Swivel Arms Separately Used
A space manipulator, gravity compensation technology, applied in manipulators, simulation devices of space navigation conditions, transportation and packaging, etc., can solve the problem of no six-degree-of-freedom space manipulator, achieve good scalability, small deformation influence, The arm of the gravity compensation device is subject to the effect of low torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
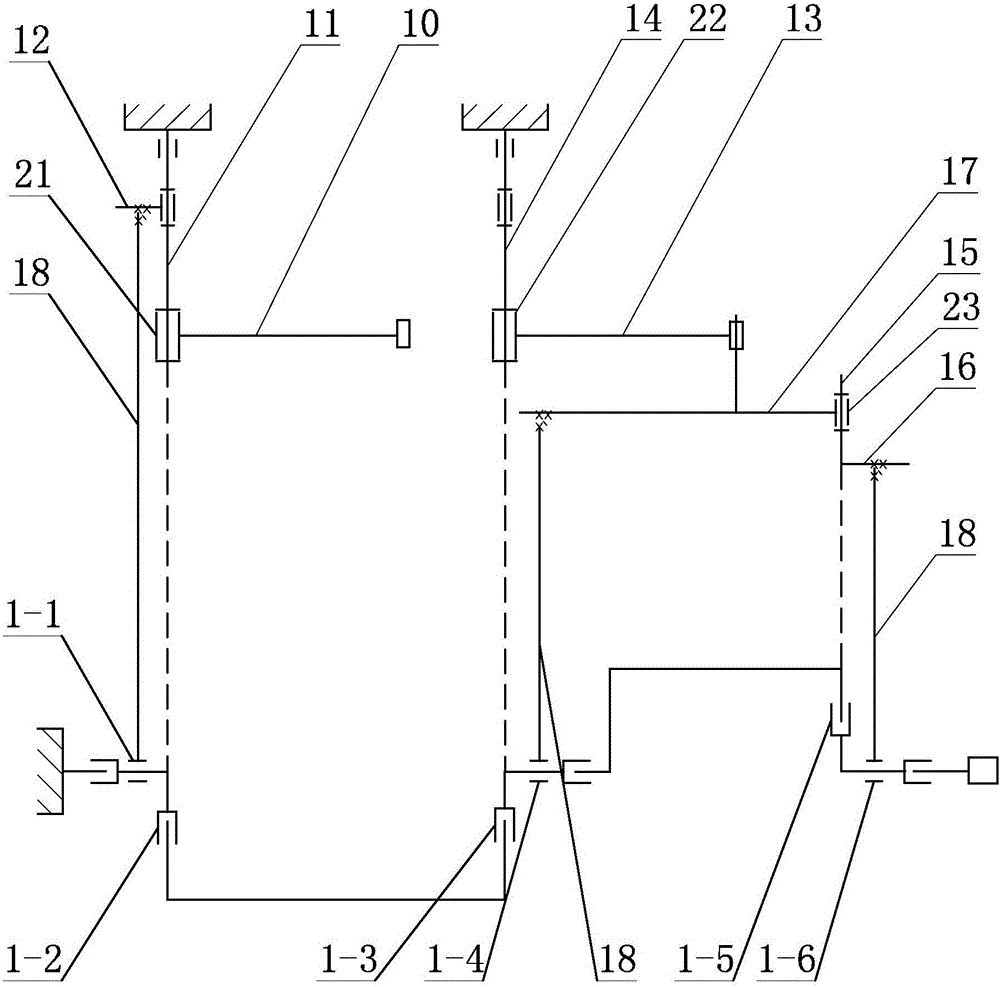
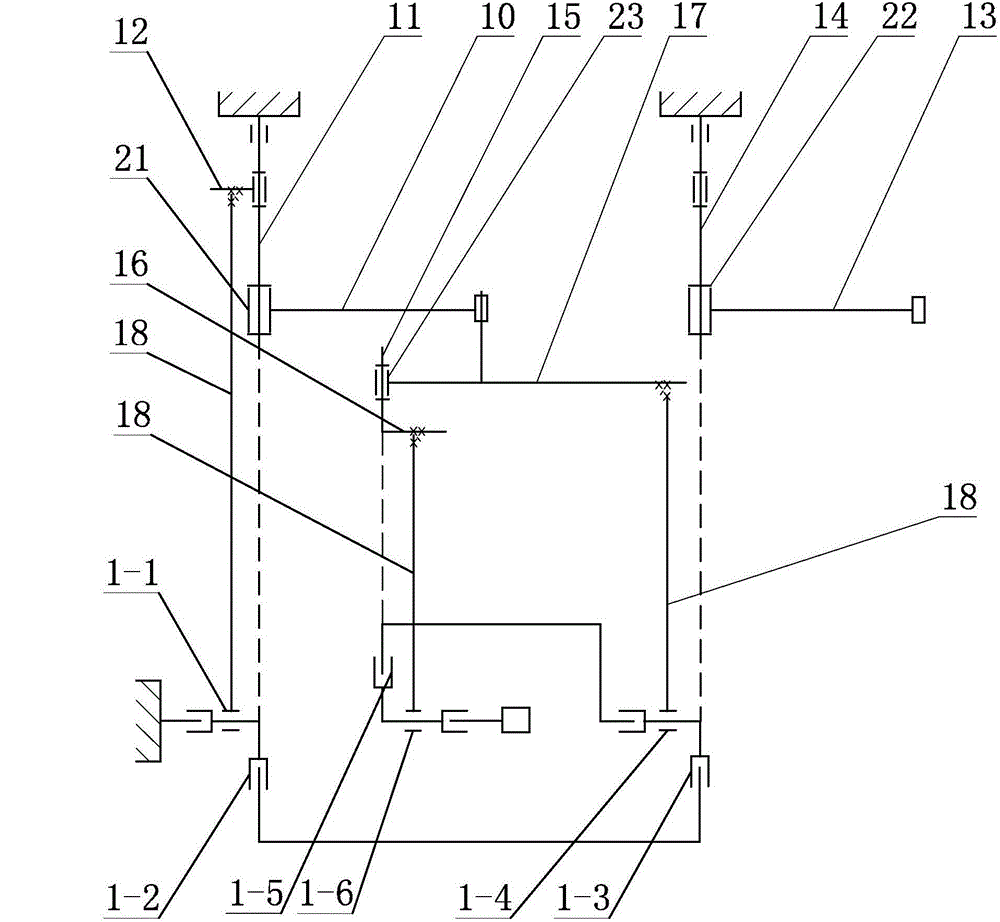
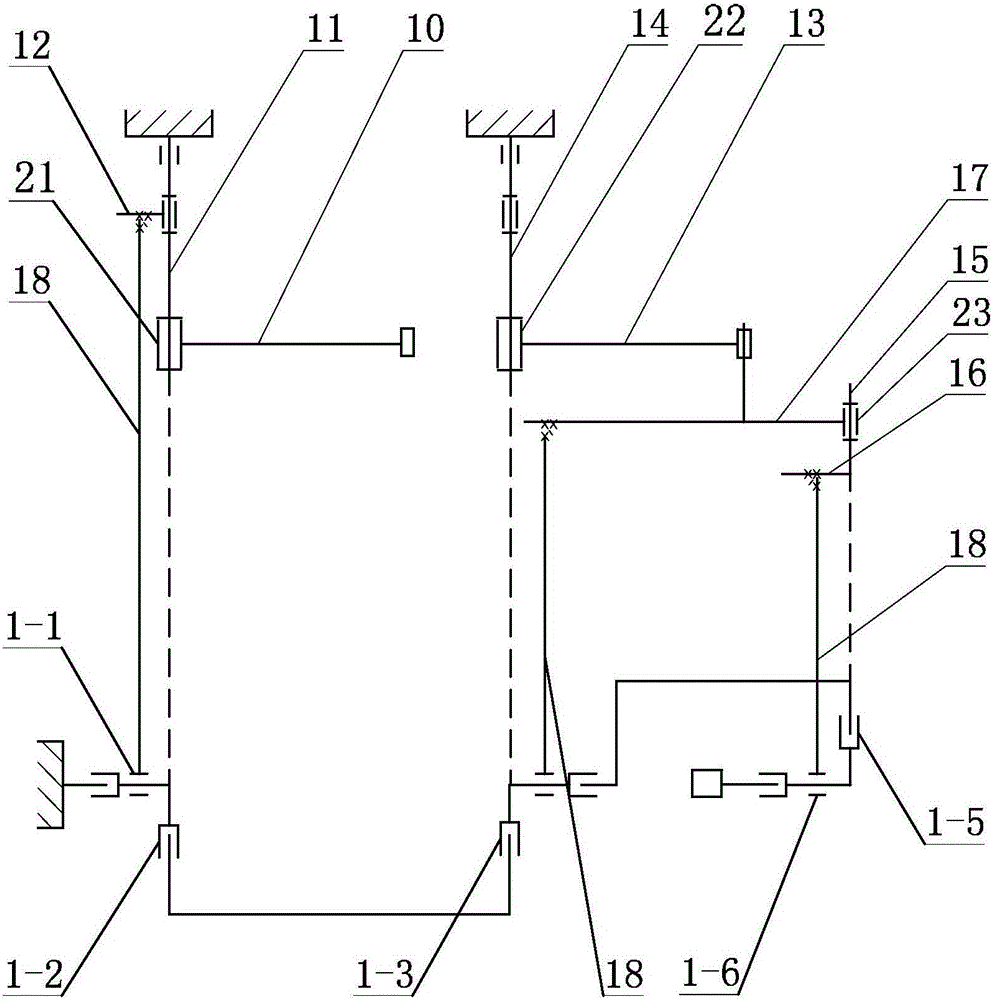
[0018] Specific implementation mode one: as Figure 1~4 As shown, the space manipulator gravity compensation device with two slewing arms used alone in this embodiment includes a main slewing system, a large slewing system and three sets of boom counterweight systems 18;
[0019] The main rotary system includes a main rotary arm 10, a main rotary shaft 11 and a forearm 12, the main rotary shaft 11 is vertically arranged and coaxially arranged with the first joint 1-2 of the space manipulator, and the upper end of the main rotary shaft 11 is fixed On the first frame, the main rotating arm 10 is arranged horizontally, and one end of the main rotating arm 10 is rotationally connected with the lower part of the main rotating shaft 11. ;
[0020] The large rotary system includes a large rotary arm 13 and a large rotary shaft 14, the large rotary shaft 14 is vertically arranged and coaxially arranged with the second joint 1-3 of the space manipulator, and the upper end of the large...
specific Embodiment approach 2
[0024] Specific implementation mode two: as figure 1 and Figure 4 As shown, the suspension rod counterweight system 18 of this embodiment includes a suspension rod 20-1, a fixed pulley 20-2 and a counterweight 20-3, and the other end of the small arm 12, the double-slewing suspension clip 17 and the small swing arm 16 A fixed pulley 20-2 is installed, and a suspension rod 20-1 is installed on each fixed pulley 20-2, and one end of the suspension rod 20-1 is connected with a counterweight 20-3, and the other end of the suspension rod 20-1 One end is connected with the corresponding link of the space manipulator. With such a design, the structure is simple, and it is convenient to adjust the counterweight of each lifting point, which provides convenience for gravity compensation. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0025] Specific implementation mode three: as figure 1 As shown, the gravity compensation device in this embodiment also includes a first bushing 21, the first bushing 21 is set on the main rotary shaft 11, and one end of the main rotary arm 10 is fixed on the outer wall of the first bushing 21 superior. In this design, the structure is simple and the structural space is compact. The first bushing 21 fixes the boom counterweight system 18 to the main rotary shaft 11, and the lower end of the boom counterweight system 18 is connected to the space manipulator, which can make the space manipulator and the space manipulator The movement of the main rotary axis 11 is synchronized so that gravity compensation can be achieved. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More