Reactive power grid coordination control method and device
A coordinated control and power grid technology, applied in the electric power field, achieves the effect of multi-time scale reactive power rolling correction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are the Some, but not all, embodiments are invented. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
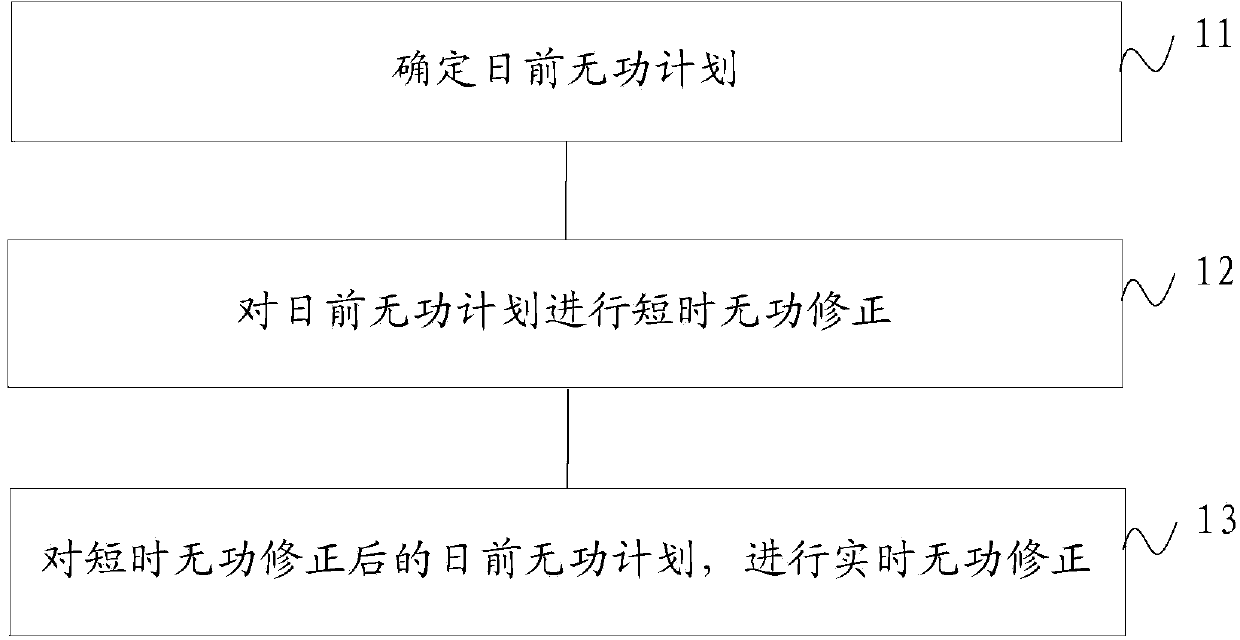
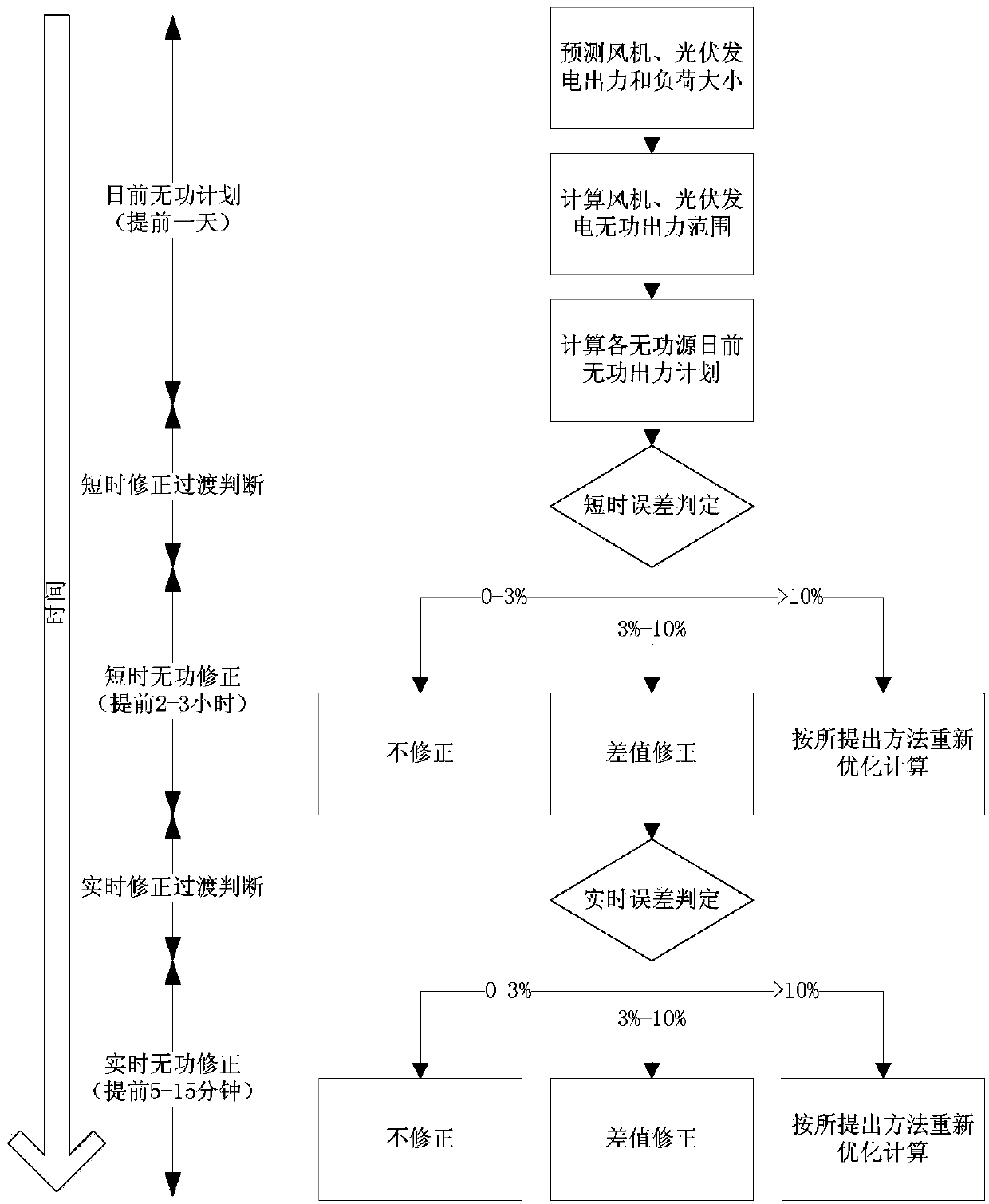
[0033] In the embodiment of the present invention, reactive power scheduling of the power grid is divided into three time scales. First of all, the 24-hour output value of each generator on the second day is determined and reported at 17:00 the previous day, and the output plan is made today. In the day-ahead plan, it is necessary to predict the wind speed and light in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More