

An asymmetric wheel-leg omnidirectional mobile chassis
An omnidirectional mobile, asymmetric technology, applied in the field of vehicle engineering, can solve problems such as not being able to meet the requirements of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
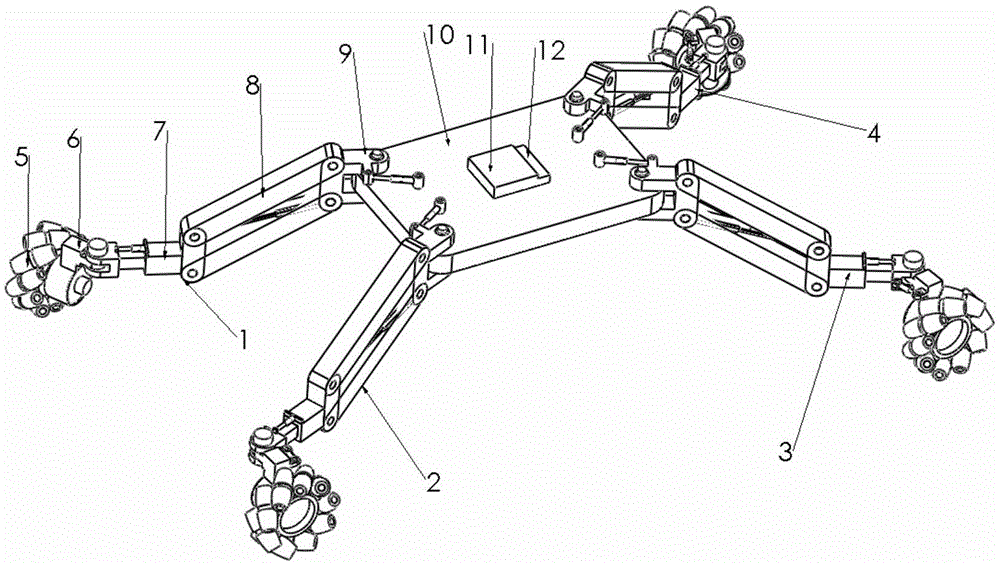
[0023] This embodiment is an asymmetric wheel-leg type omnidirectional mobile chassis.
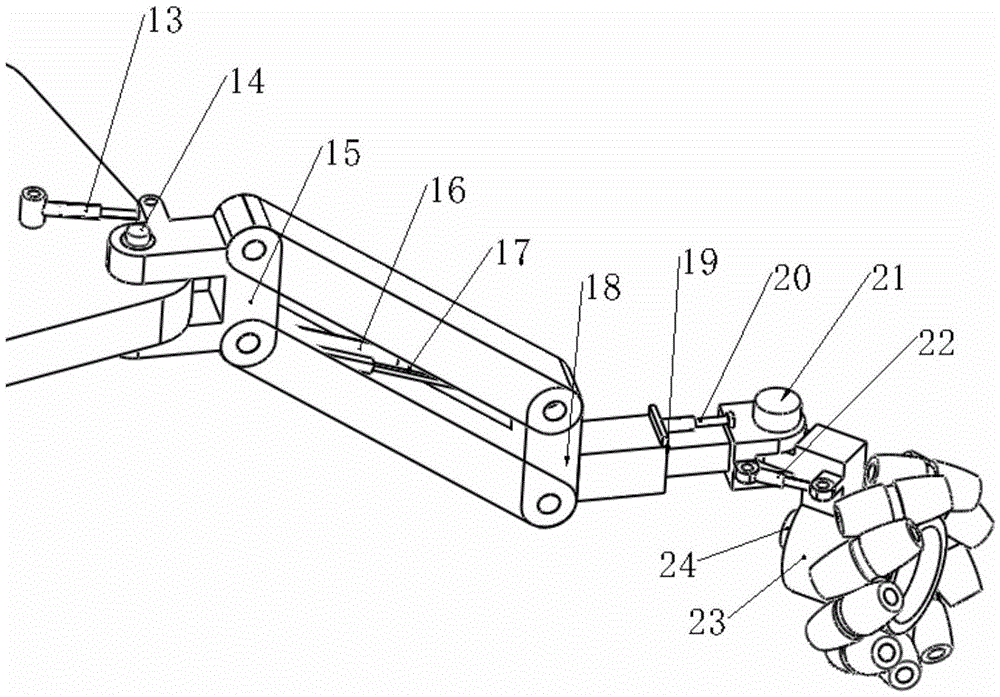
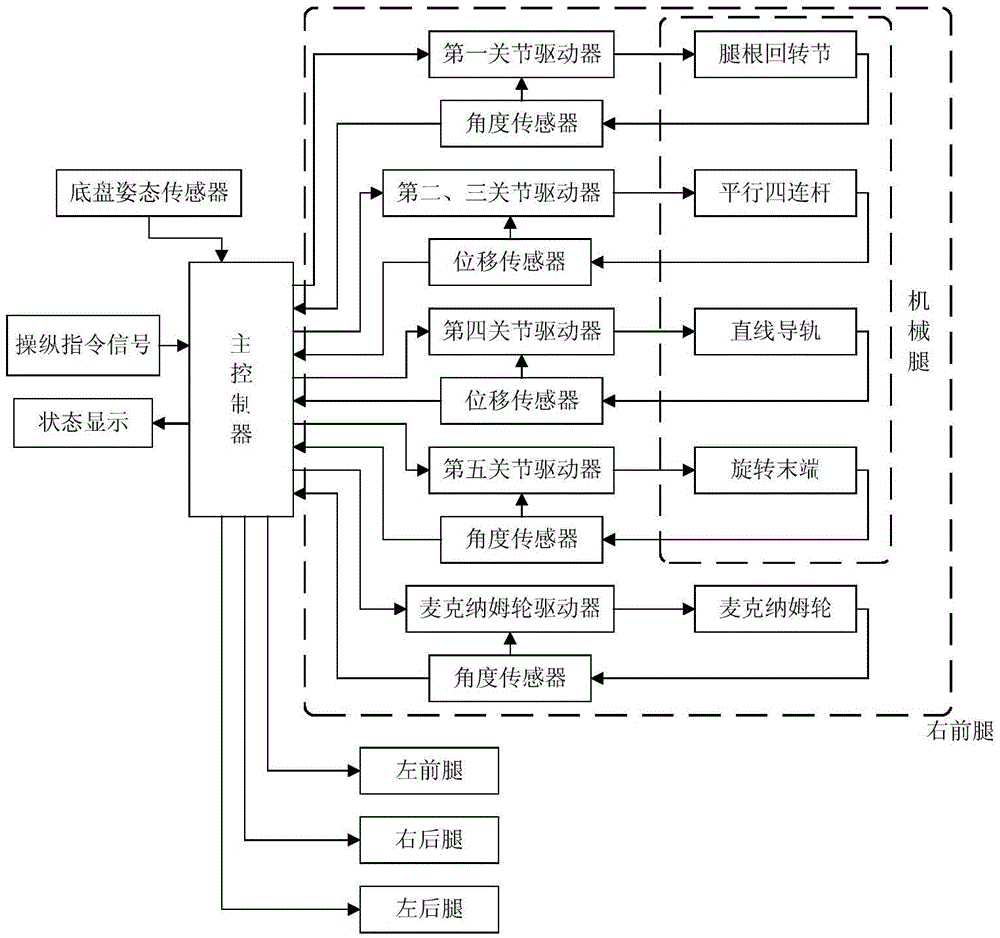
[0024] refer to figure 1 , figure 2 , image 3 In this embodiment, the asymmetric wheel-leg type omnidirectional mobile chassis includes a chassis frame, a controller, a mechanical leg, a mecanum wheel, a driver, and a sensor. The mechanical leg is hinged to the chassis frame and is installed in four directions of the chassis frame. , the four mechanical legs have the same structure, and the mecanum wheels are respectively installed at the ends of the mechanical legs. Taking the right front leg 1 as an example, it is connected from the chassis frame 10 to the mecanum wheel 5, which are respectively the leg root swivel joint 9, the parallelogram 8, the linear guide rail 7, and the rotating end 6. The leg-root swivel joint 9 is hinged with the chassis frame 10, and the leg-root swivel joint driver 13 and the leg-root swivel joint angle sensor 14 are installed to control the rotation in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More