Method for detecting tumbling state of humanoid robot based on multi-sensor information
A humanoid robot and multi-sensor technology, applied in the field of humanoid robot state detection, can solve the problems of incomplete determination of robot stability and controllability, and achieve the effect of improving the accuracy of determination and reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings, but the implementation and protection of the present invention are not limited thereto. Achieved with technology.
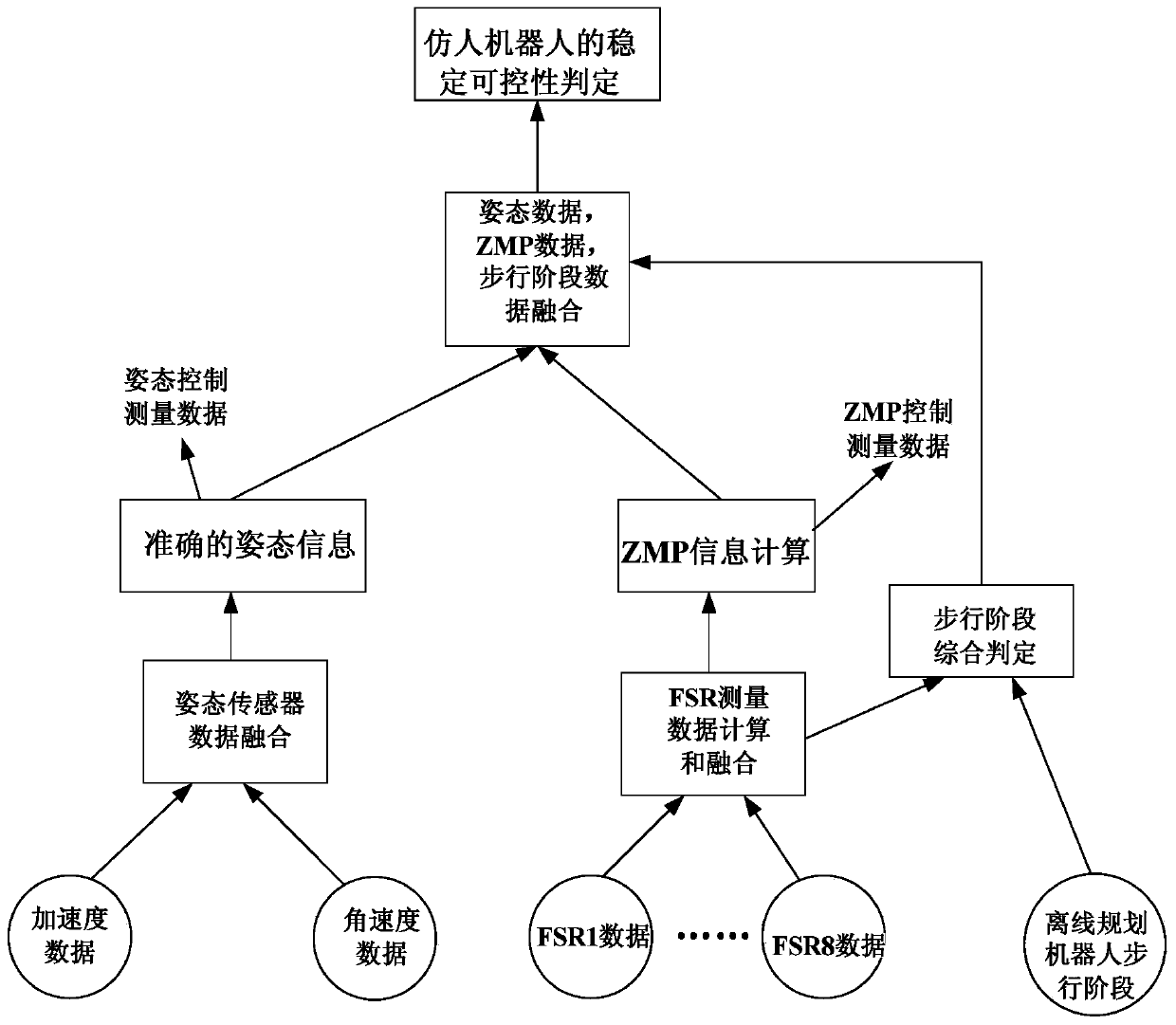
[0049] (1) Establish a robot multi-sensor information fusion model during the walking process of the humanoid robot to provide information and judgment results for the control of the robot, so that the controller can control the stable walking of the humanoid robot and protect it when it falls to the ground action. According to the characteristics of sensor information fusion, the present invention proposes a sensor information fusion model with layered structure to realize the stability judgment of the walking process of the humanoid robot. See attached figure 1 .
[0050] Wherein the acceleration sensor and the angular velocity sensor are installed at the hip joint of the robot. The FSR sensor is installed on the botto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More