

Robot Trajectory Tracking Method Based on Skinner Manipulative Conditioning Automata
Patent Information
- Authority / Receiving Office
- CN · China
- Patent Type
- Patents(China)
- Current Assignee / Owner
- BEIJING UNIV OF TECH
- Publication Date
- 2017-09-08
Smart Images
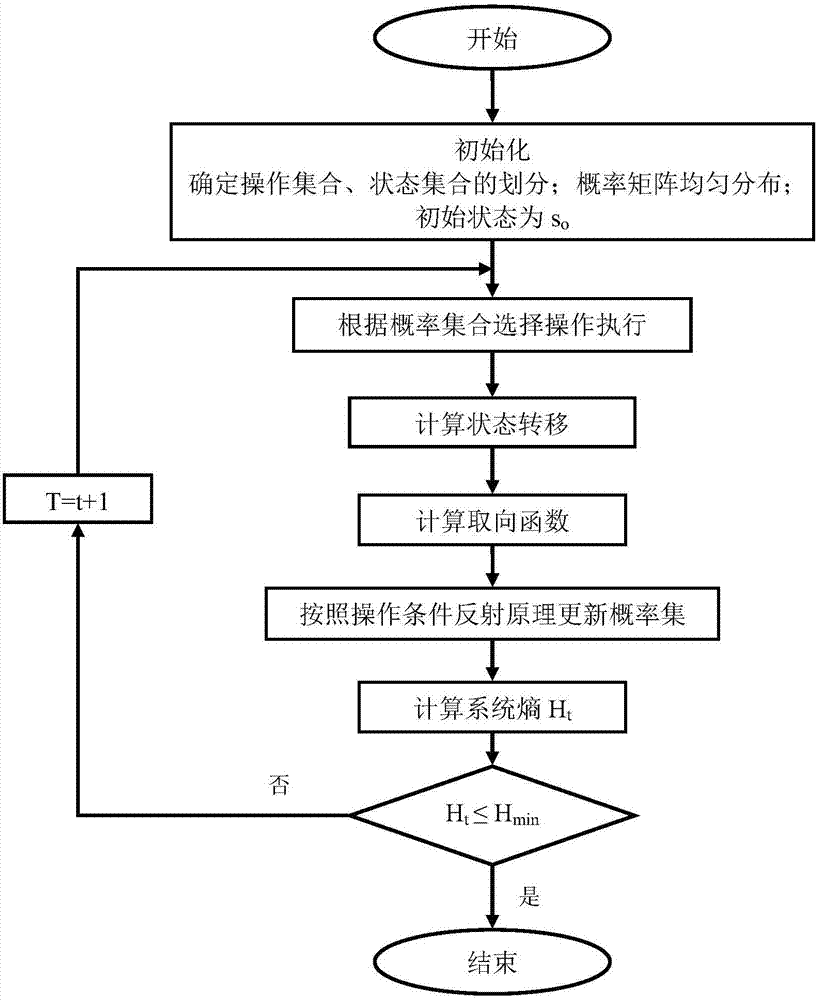
Figure 1 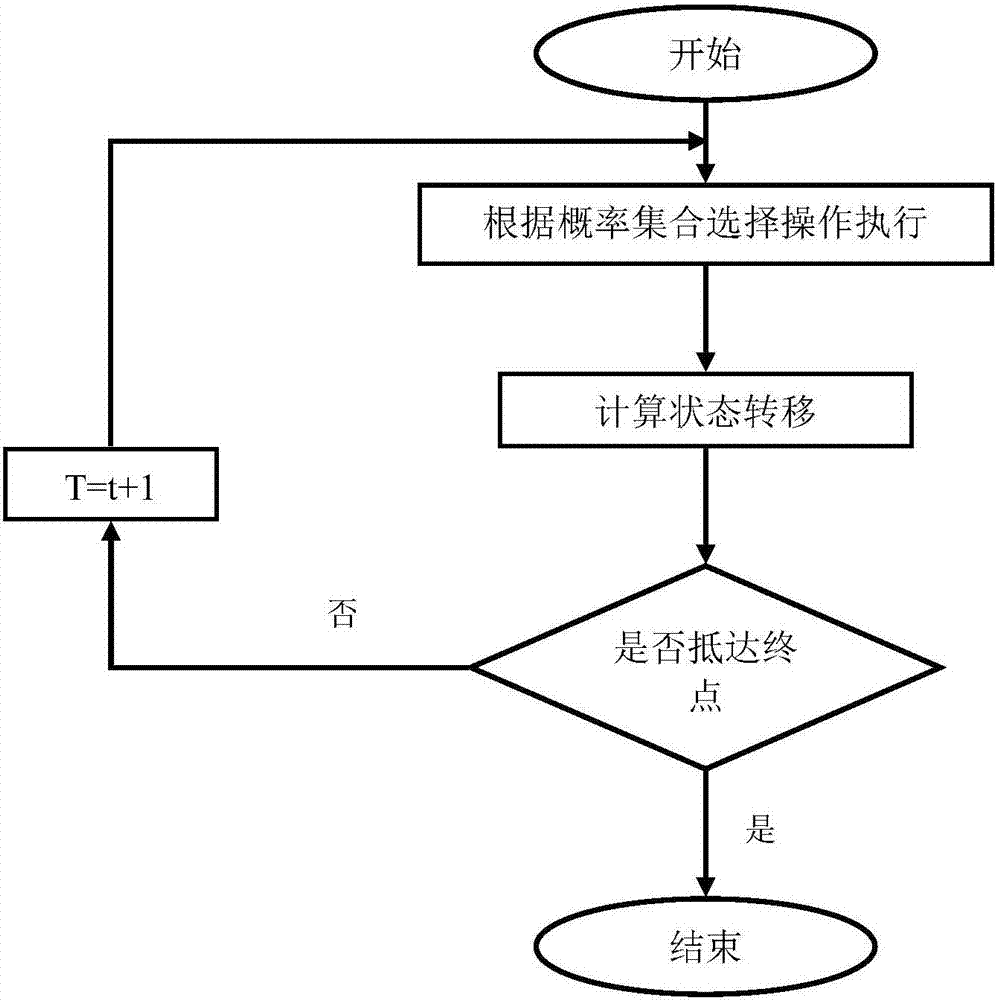
Figure 2 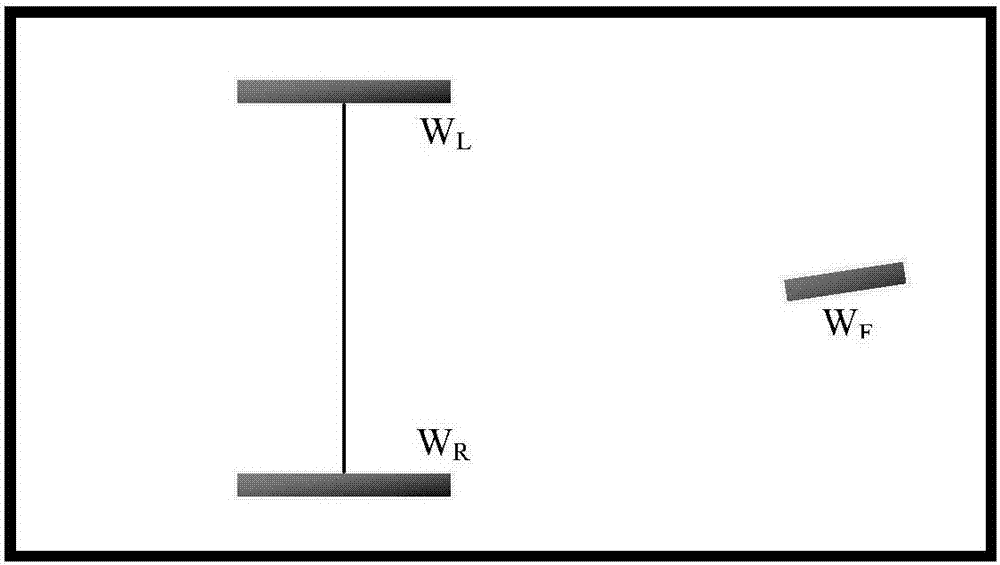
Figure 3
Abstract
Description
technical field
[0001] The invention relates to the field of trajectory tracking of mobile robots, in particular to a robot trajectory tracking method based on Skinner (Skinner) operating conditional reflex automata. Background technique
[0002] With the development of autonomous mobile robot technology, the application fields of autonomous mobile robots are becoming more and more extensive. It can replace humans to reach many unreachable or dangerous environments, such as fire and earthquake search and rescue robots; it can also replace humans to do some service work, such as museum tour guides. The trajectory tracking motion control of mobile robots can not only be directly used in the fields of tracking targets, robot formations, etc., but also, tracking lines is a simplification of environmental information, which is conducive to the development of more effective algorithms for autonomous vehicles in complex environments. on the mobile robot.
[0003] Classical contro...