

A flexible robotic gripper capable of passive envelope
A kind of manipulator claw, flexible technology, applied in the direction of manipulator, program control manipulator, chuck, etc., can solve the problem that the manipulator claw can not meet the complex and changeable grasping requirements, etc., to reduce the production cost, strong application flexibility, mechanism structure simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0022] This embodiment provides a flexible robotic gripper capable of passive enveloping, which mainly includes a driving platform, a driven platform, and three passive fingers with identical structures and identical connection methods.
[0023] The drive platform includes a centrally symmetrical shell structure, which can usually be shaped like a regular triangle, regular hexagon, or regular dodecagon. The line passing through the center of symmetry of the shell structure and perpendicular to the top surface of the shell structure is called the drive platform axis.
[0024] The driven platform includes a center-symmetric flat plate structure, the shape of which can usually be a regular triangle, regular hexagon or regular dodecagon, etc., and the flat plate structure is located inside the shell structure of the driving platform. The line passing through the center of symmetry of the plate structure and perpendicular to the plane where the plate structure is located is called ...
Embodiment 2
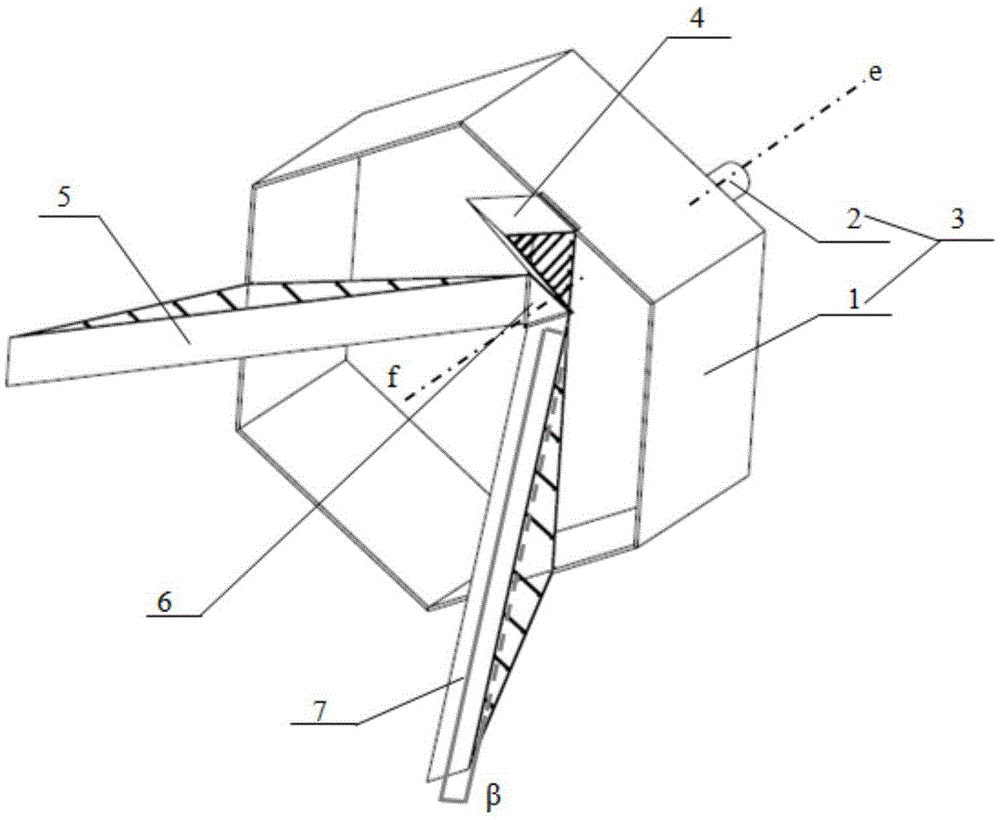
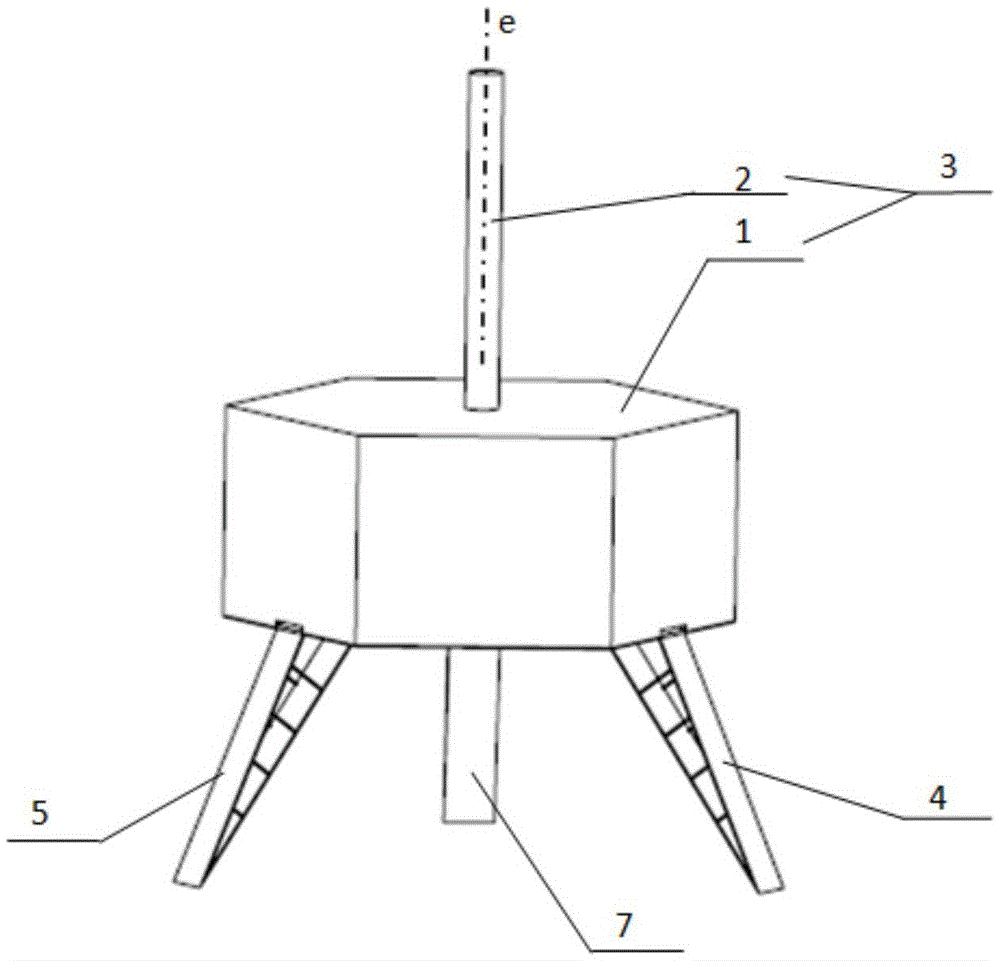
[0031] Such as figure 1 and figure 2 As shown, the present embodiment provides a flexible robotic gripper that can realize passive enveloping, which is mainly composed of a driving platform 3, a driven platform 6 and three passive fingers, and the three passive fingers include a first passive finger 7, a second passive finger 4 and the third passive finger 5.
[0032] The driving platform 3 includes a regular hexagonal shell structure 1 and a cylindrical rod body 2. The regular hexagonal shell structure 1 is composed of a regular hexagonal top surface and six identical side walls connected to the top surface. The cylindrical rod body 2 The top surface of the vertical shell structure 1 is fixed at its geometric center. The rod body 2 is connected with a linear driver, and under the action of the linear driver, the housing structure 1 can be driven to move linearly along the axis e of the rod body 2 together.
[0033] The driven platform 6 is located inside the housing struc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More