

Seven-freedom-degree five-finger mechanical arm
A manipulator and degree of freedom technology, applied in the field of robotics, can solve problems such as poor precision, low intelligence, and weak versatility, and achieve the effect of expanding the grasping space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
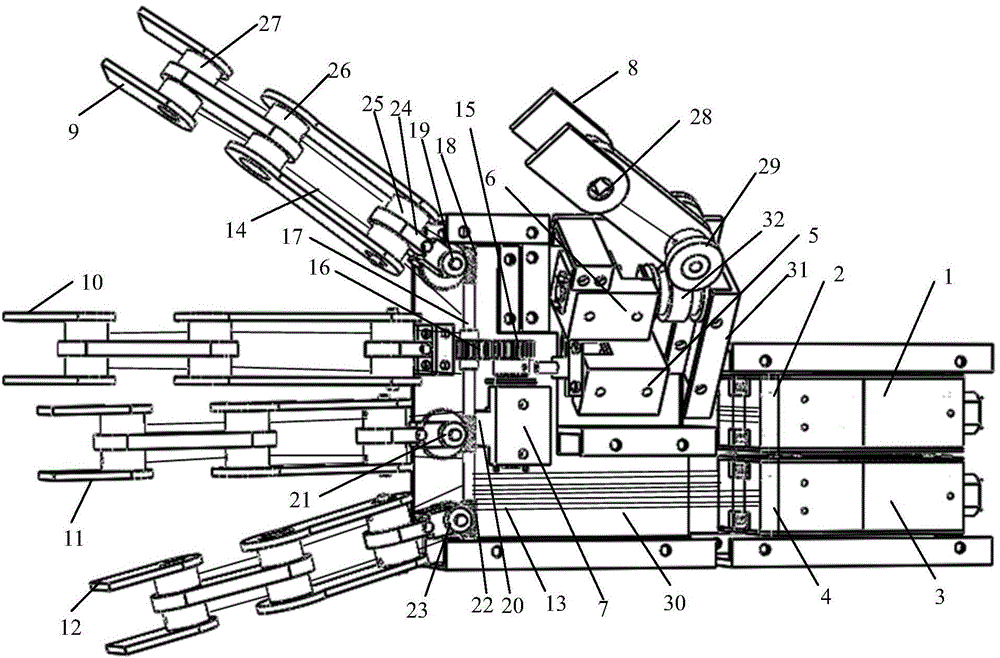
[0012] Attached below figure 1 Describe this embodiment in detail:
[0013] The structure of the embodiment of the 7-DOF five-finger manipulator of the present invention is as follows: figure 1 As shown, the manipulator includes a palm and five fingers; the index finger 9, middle finger 10, ring finger 11 and little finger 12 all have one degree of freedom for bending, and the index finger 9, ring finger 11 and little finger 12 have one degree of freedom for swinging so that the three fingers can be stretched simultaneously. To open or close, the thumb 8 has 1 bending degree of freedom and 1 swinging degree of freedom, totaling 7 degrees of freedom.
[0014] This manipulator also comprises 7 motors, driving gear 15, driven gear 16, power transmission shaft 17 and driving wire rope 13, passive wire rope 14, three pairs of worm gears, worm screw 18-23, hoop 24, cylinder 32; Wherein, thumb 8 is made of Thumb base 31 and two knuckles 28, 29 are formed, the fifth motor 5 is fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More