Narrow foot three-dimensional pure passive walker
A walker, 3D technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of wide feet, not suitable for practical application, no anthropomorphic effect, etc., and achieve the effect of simple device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] Hereinafter, the preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, not for limiting the protection scope of the present invention. In the present invention, since the two legs and two feet are symmetrical, only one is described, and the structure of the other is consistent with it.
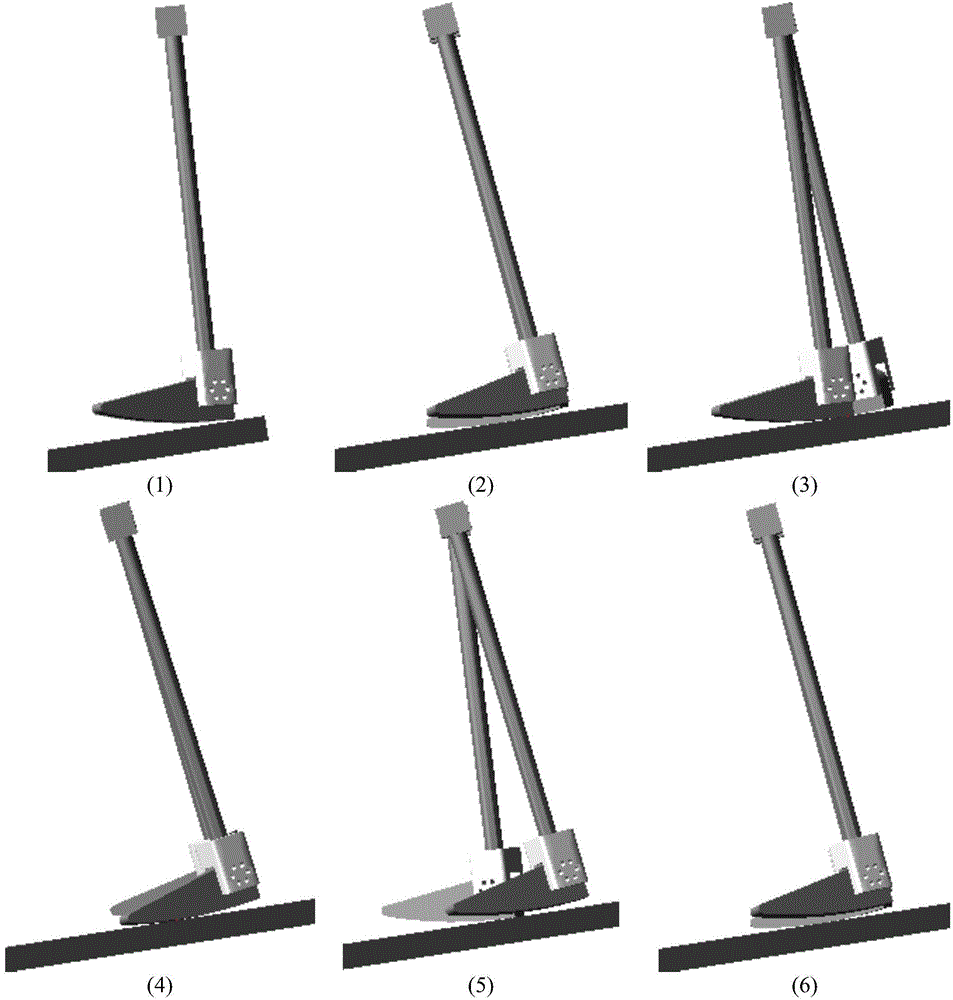
[0016] See figure 1 , A narrow-footed 3D pure passive walker, comprising a pair of straight legs 2, the upper end of the straight legs 2 is connected with the hip 1, the rotation of the straight legs 2 around the hip 1 is realized by a bearing 7, the straight legs 2 A pair of leg-foot connectors 4 are used to connect the narrow arc-shaped feet 5 at the lower ends of the two straight legs 2, and counterweights 3 are provided on the two straight legs 2.
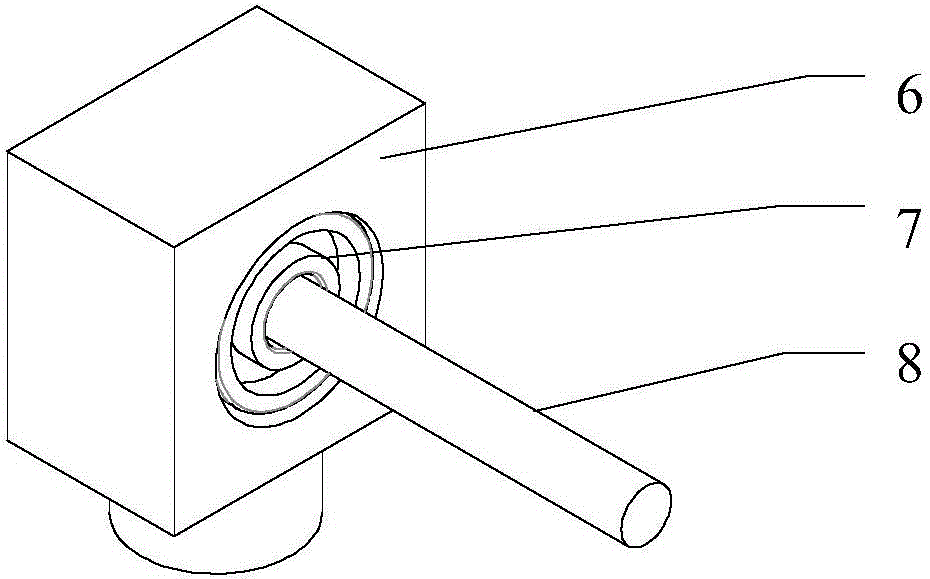
[0017] See figure 2 , The hip and leg joints are mainly realized by bea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com