Three-dimensional human-simulating walking device and control method thereof
A control method and walking device technology, applied in the field of robotics, can solve problems such as high energy consumption, complex device structure, and unsuitability for practical applications, and achieve the effect of simple device and simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
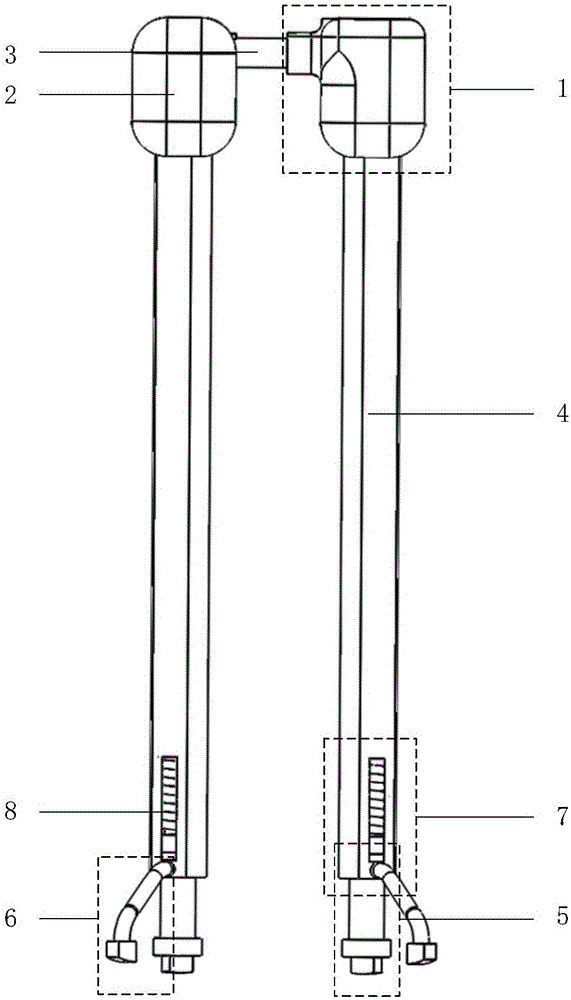
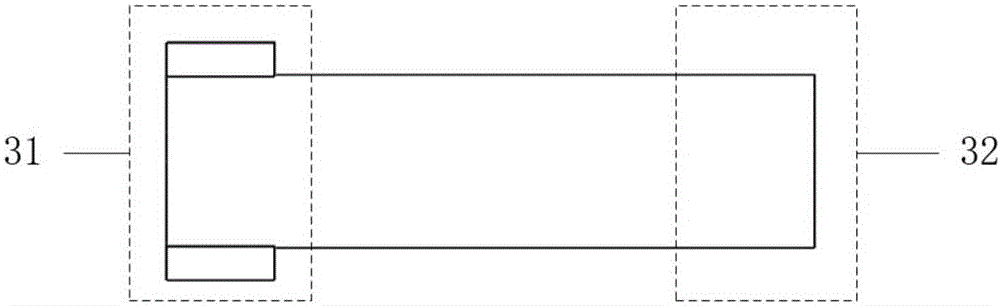
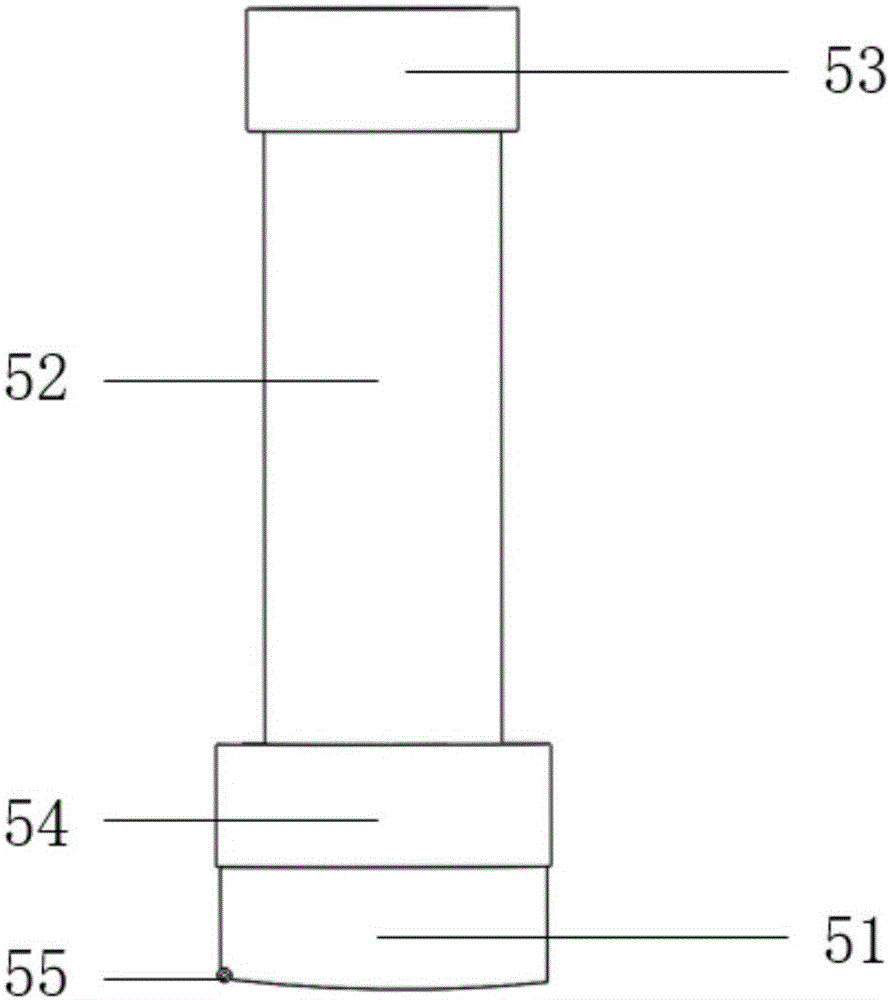
[0027] Such as figure 1 , 2 , 3, and 4, the three-dimensional humanoid walking device provided by the present invention includes: a control block 1, a controlled block 2, a transmission shaft 3, straight legs 4, feet 5,6; the control block 1 includes a motor, a main Control board, data acquisition device, power supply, it is fixed on the left (right) straight leg 4, main control board drives motor to provide power for walking device according to data acquisition device and pressure sensor data, and power supply supplies power for each energy-consuming device; The controlled block 2 is fixed on the right (left) straight leg 4, on which there is a groove connecting the transmission shaft; the convex side 31 of the transmission shaft is fixed in the groove on the controlled block, and the motor side 32 is fixed on the motor The straight leg ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com