

Crawler-type pipeline robot with active adaptation and self-adaptation functions
A pipeline robot and crawler technology, applied in the field of robots, can solve problems such as the influence of use effects and poor environmental adaptability, and achieve the effects of simple structure, safe operation and wide application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
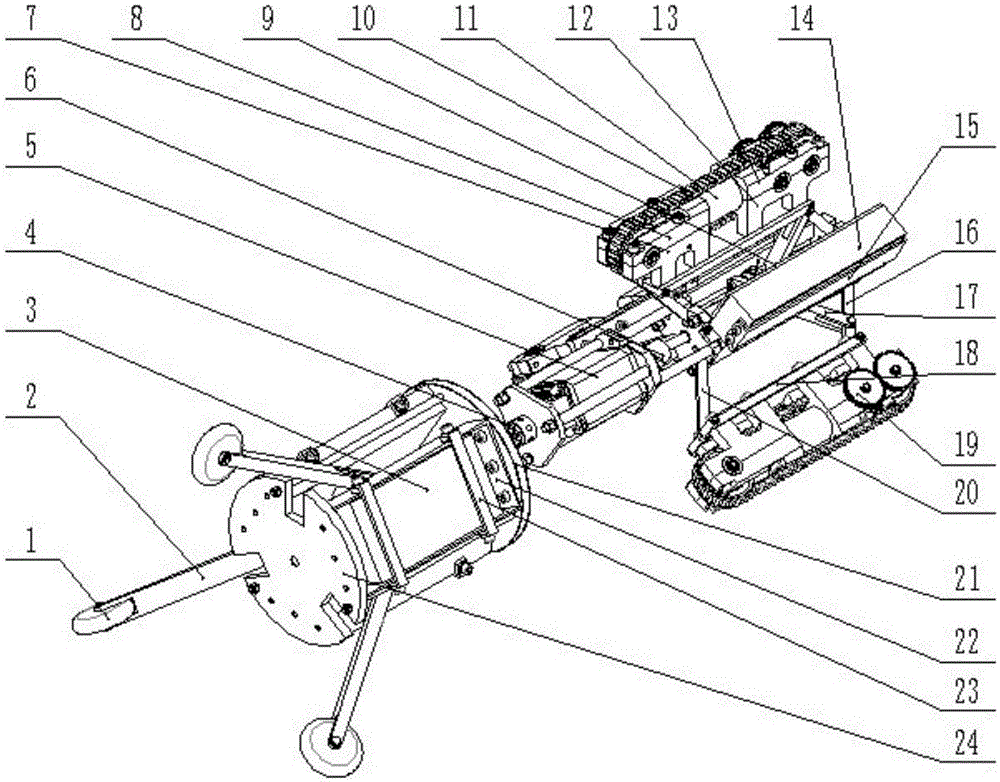
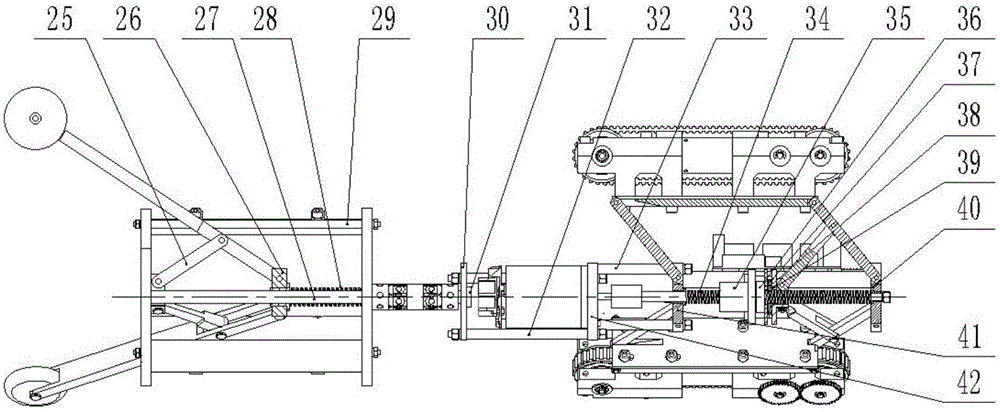
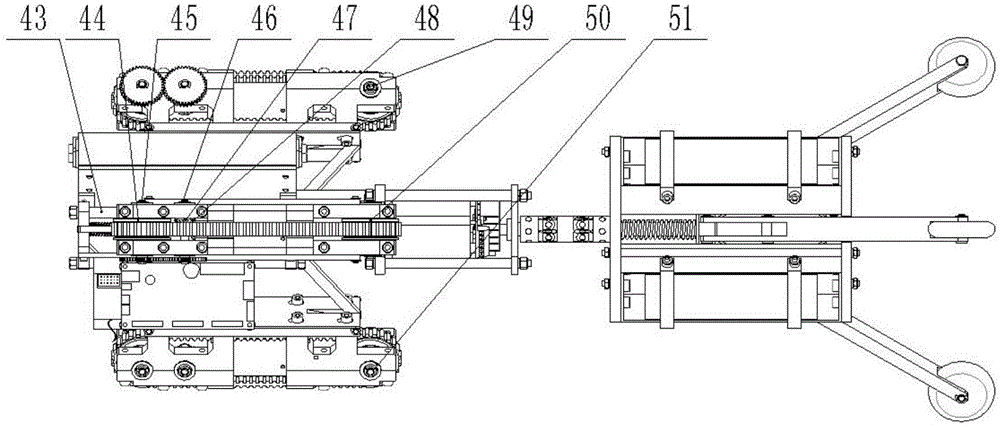
[0012]The main structure of this embodiment includes a follower roller assembly 1, a follower rocker 2, a follower battery 3, a universal joint 4, a stepping motor 5, a coupling 6, a rear lower support seat 7, Rear upper support base 8, support plate 9, double-sided synchronous toothed belt 10, servo motor assembly 11, front lower support base 12, front upper support base 13, battery box for control system 14, battery box pressure plate 15, driving crank 16 , small connecting rod 17, connecting rod 18, cylindrical gear 19, driven crank 20, connecting plate 21 before the follower, battery box 22 of the follower, battery box pressing plate 23 of the follower, connecting plate 24 after the follower, Follower connecting rod 25, follower sliding seat 26, follower guide shaft 27, follower compression spring 28, follower connecting rod 29, stepper motor rear connection plate 30, shaft head 31, stepper motor Connecting rod 32, intermediate connecting rod 33, ball screw 34, leading scr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More