

Control method for tracking motion speed and motion track of rehabilitation training robot at the same time
A robot motion and rehabilitation training technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of neglecting speed tracking, patients unable to achieve exercise intensity, and threatening safety. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
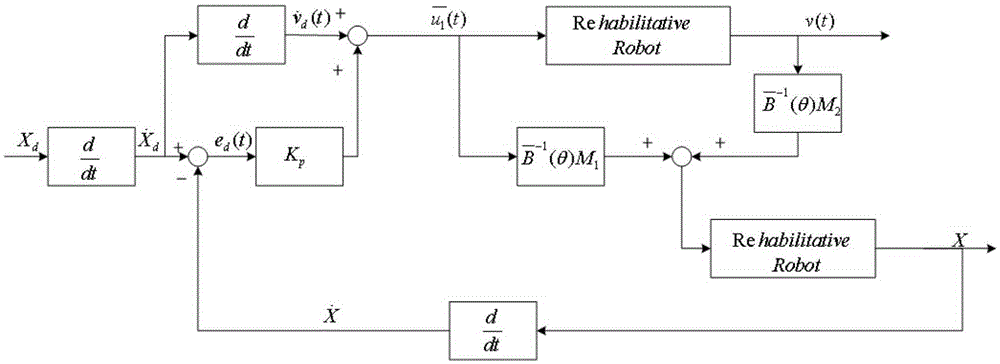
[0072] As shown in the figure, the present invention comprises the following steps:
[0073] Step 1) Based on the characteristics of the redundant rehabilitation walking training robot, combined with the kinematics and dynamics models, the nonlinear input-output linearization theory is applied to establish the decoupled state equation between the speed of each driving wheel and the driving force, and the motion of the system Learning model is
[0074] V = K c X · - - - ( 1 )
[0075] in
[0076] V = v 1 v ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More