

Control method of parameter self-tuning motor controller
A technology of motor controllers and control methods, applied to controllers with specific characteristics, electric controllers, etc., can solve problems affecting system performance, low algorithm efficiency, and difficult engineering fields
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
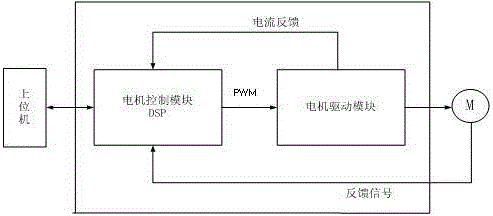
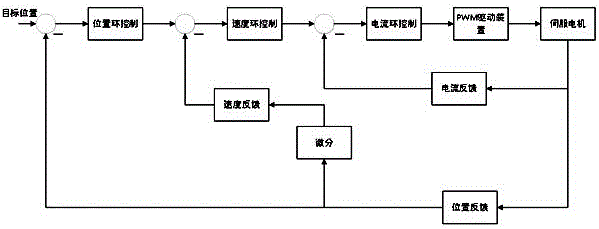
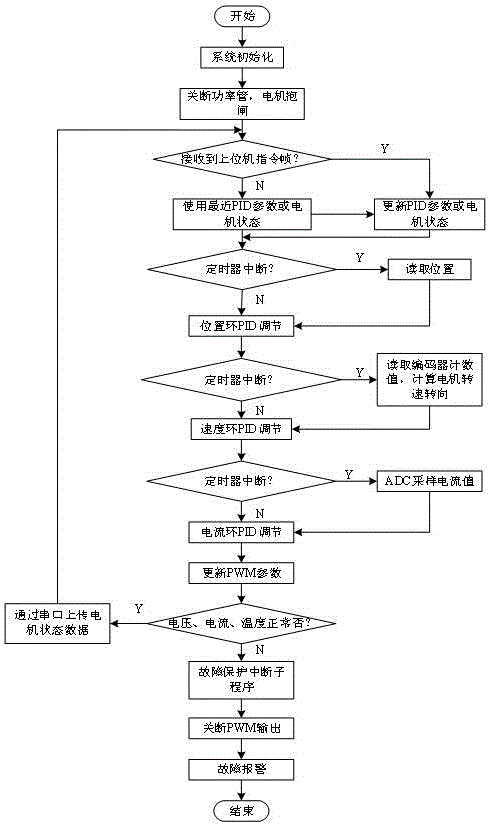
[0058] Attached below figure 1 , 2 , 3, 4 describe the present invention in detail:
[0059] A control method for a motor controller whose parameters can be self-tuned, realizes three closed-loop servo control of current, speed and position of a two-channel DC brushed or DC brushless motor, uses motor model analysis to identify the value of the moment of inertia, and then Combining the relationship between the PID controller parameters and the moment of inertia, the appropriate control parameters are directly calculated to realize the self-tuning of the controller parameters:
[0060] (1) Calculation of speed loop parameters:
[0061] The speed loop improves the response speed of the speed loop under the premise of system stability; the stability and response speed of the system are measured by the phase angle margin and closed-loop bandwidth respectively;
[0062] a. Closed-loop bandwidth
[0063] The frequency corresponding to the -3dB point of the closed-loop amplitude-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More