

UUV control method based on T-S fuzzy observer compensation
A control method and observer technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of inaccurate track tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
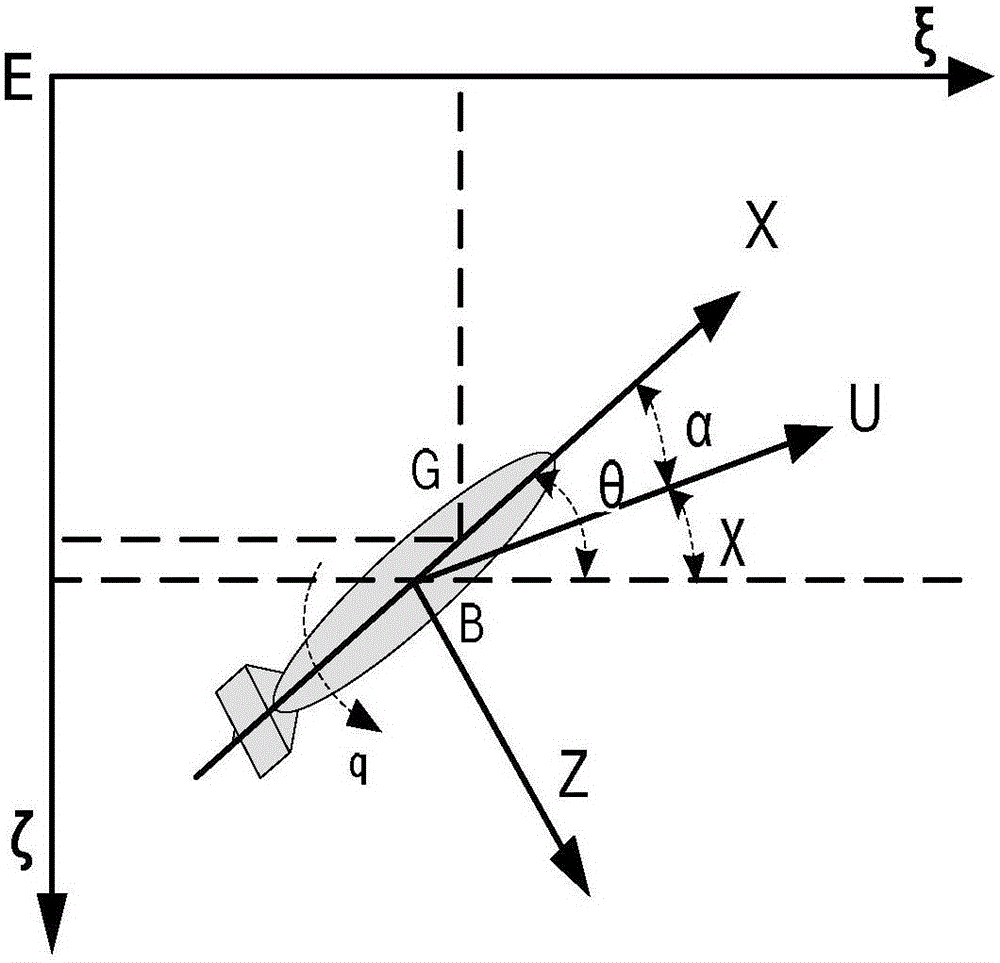
[0059] In the UUV control method based on T-S fuzzy observer compensation described in this embodiment, the UUV studied in this embodiment has non-holonomic constraints such as underdrive and non-integrable acceleration, and is affected by external ocean currents, resulting in a complex model. The UUV model is equipped with a horizontal thruster on the tail to provide longitudinal thrust, a vertical rudder for heading control, and a horizontal rudder for trim or depth control. For the convenience of analysis, the following assumptions are made for the UUV model: UUV speed is non-negative, that is, the trajectory control during reverse travel is not considered; the influence of roll motion is ignored; the UUV object under consideration is symmetrical.
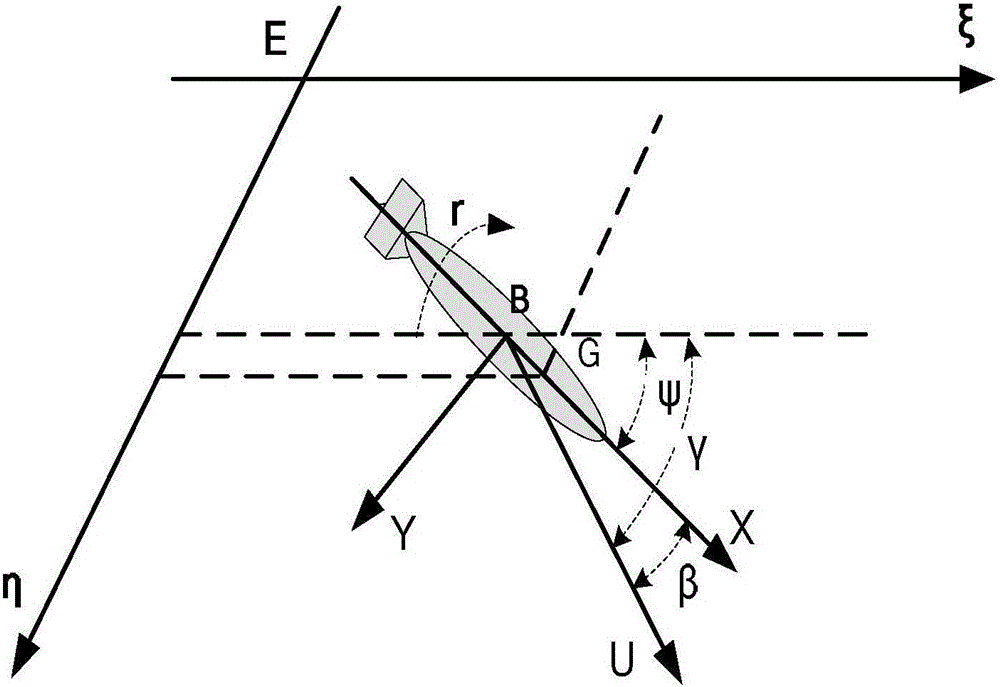
[0060] In the UUV motion analysis and maneuverability test, it is usually divided into two aspects: the horizontal plane and the vertical plane. The horizontal plane analysis is mainly used to investigate the UUV speed and the stab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More