

All-wheel same-phase driving trolley and turning control method thereof
An in-phase, trolley technology, applied in the field of robots, can solve the problems of complex and difficult turning under the same phase of all wheels, and achieve the effect of simple and reliable structure, strong obstacle-surmounting ability and strong practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
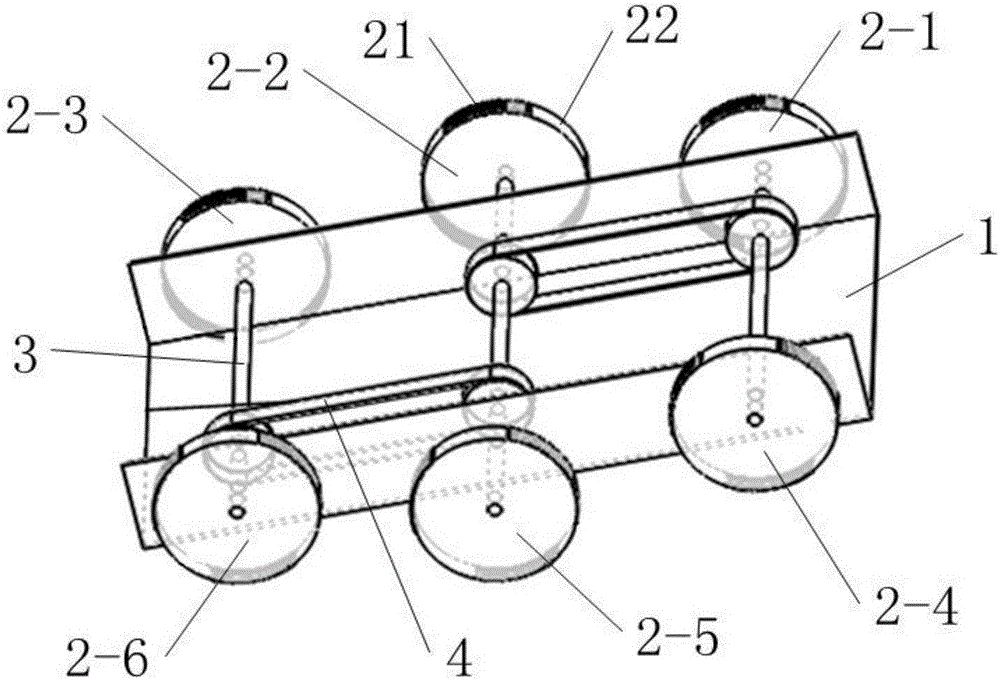
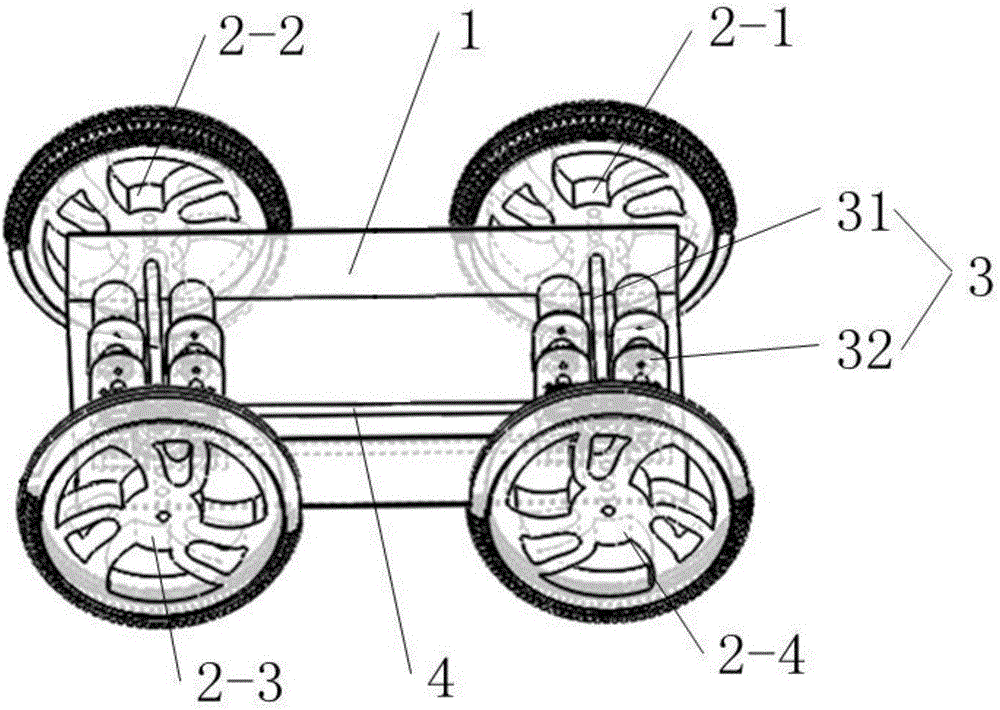
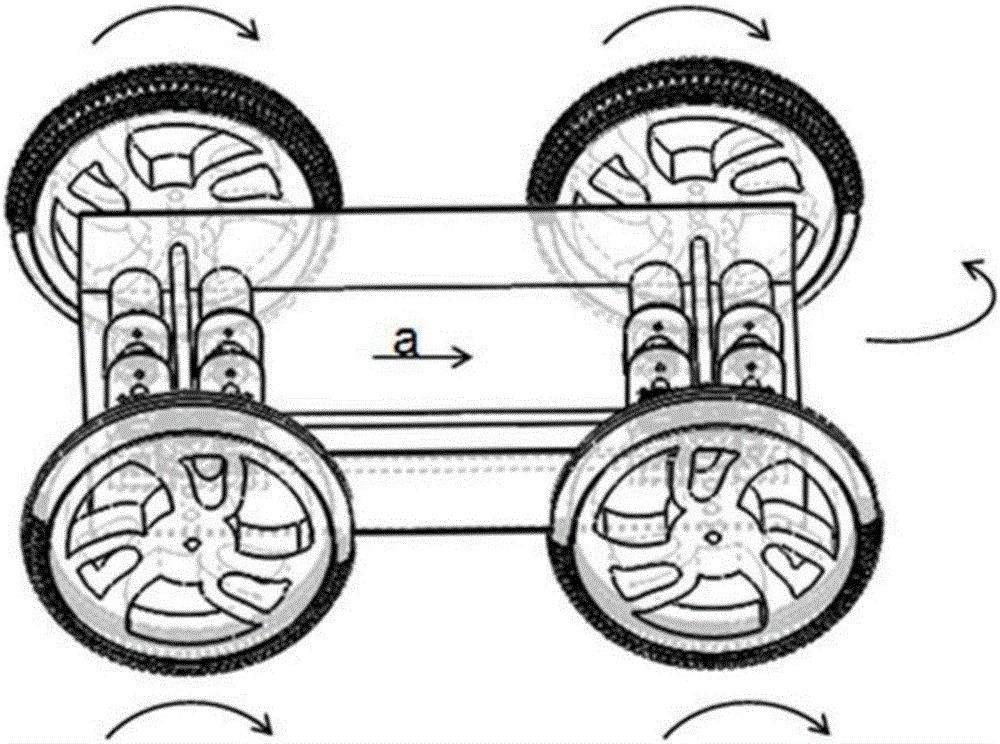
[0027] Such as figure 1 As shown, the all-wheel in-phase drive trolley among the present invention comprises a trolley body 1 and six round wheels 2-1, 2-2, 2-3, 2-4, 2-5 and 2-6, the two round wheels are symmetrically arranged on both sides of the trolley body 1 through the driving part 3, that is, the round wheels 2-1, 2-2 and 2-3 are installed on one side, and the round wheel 2 is installed on the other side -4, 2-5 and 2-6. There are several segments of large friction circular arc segments 21 evenly distributed on each of the circular wheels, and the large friction circular arc segments 21 on the two symmetrically arranged circular wheels are complementary and can form a complete circle, which are located on the same side of the trolley body 1 The arc segments 21 with large friction force on the round wheel have the same phase. That ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More