

An online real-time torque optimal allocation control method for distributed drive electric vehicles
A technology for optimizing distribution of electric vehicles, applied in the direction of electric vehicles, control drives, control devices, etc., can solve problems such as large deviations, achieve the effects of meeting vehicle operation requirements, reducing system power consumption, and improving overall drive efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
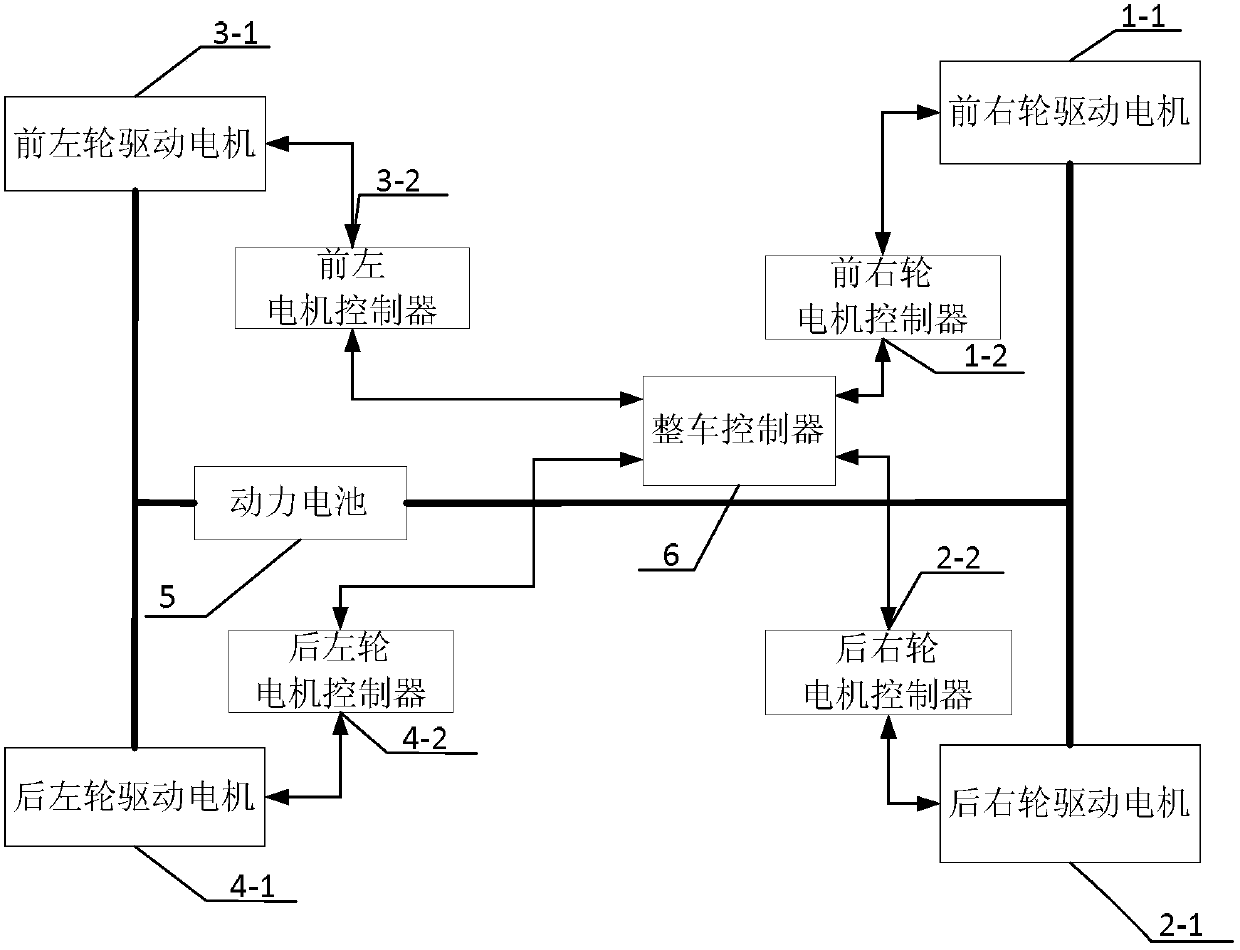
[0022] Specific implementation mode 1. Combination figure 1 and figure 2 Describe this embodiment, a distributed drive electric vehicle online real-time torque optimal allocation control method described in this embodiment, the method is realized based on the distributed drive electric vehicle online real-time torque optimal distribution control device, the device includes four Drive motor, four drive motor controllers, power battery pack 5 and vehicle controller 6;
[0023] The four drive motors are: front right wheel drive motor 1-1, rear right wheel drive motor 2-1, front left wheel drive motor 3-1 and rear left wheel drive motor 4-1;
[0024] The four drive motor controllers are: front right wheel motor controller 1-2, rear right wheel motor controller 2-2, front left wheel motor controller 3-2 and rear left wheel motor controller 4-2;
[0025] The drive signal input state signal output end of the front right wheel drive motor 1-1 is connected to the drive signal output...
specific Embodiment approach 2
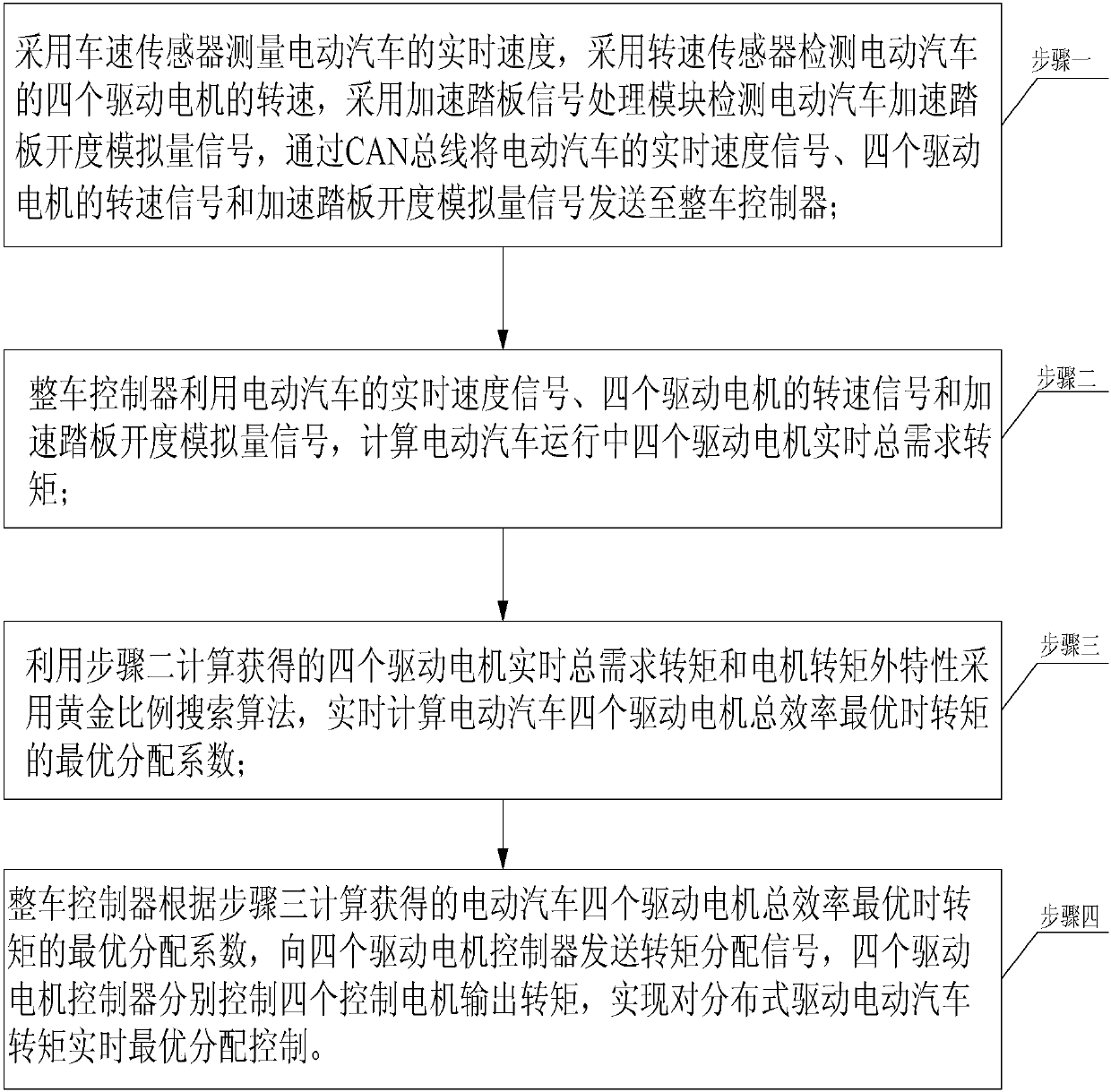
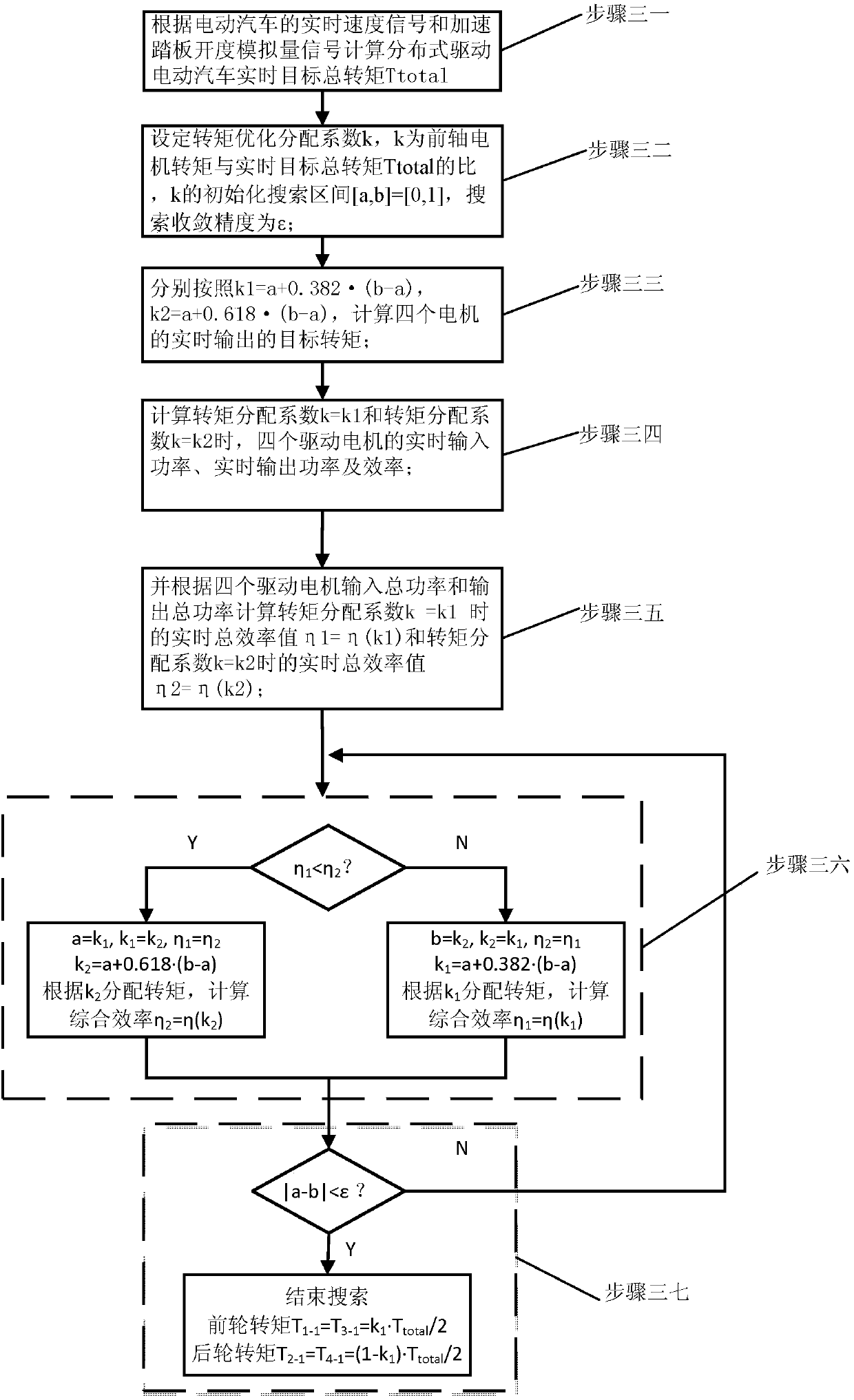
[0036] Specific embodiment two, combine image 3Describe this embodiment. This embodiment is a further description of a distributed drive electric vehicle online real-time torque optimization distribution control method described in the first specific embodiment. The real-time total demand torque of the motor and the external characteristics of the motor torque use the golden ratio search algorithm to calculate the optimal distribution coefficient of the torque of the four driving motors of the electric vehicle in real time; the specific steps are:
[0037] Step 31. Calculate the real-time target total torque Ttotal of the distributed drive electric vehicle according to the real-time speed signal of the electric vehicle and the analog signal of the accelerator pedal opening;
[0038] Step 32: Set the torque optimization distribution coefficient k, k is the ratio of the front axle motor torque to the real-time target total torque Ttotal, the initialization search interval of k ...
specific Embodiment approach 3
[0049] Specific embodiment 3. This embodiment is a further description of the online real-time torque optimization distribution control method for distributed drive electric vehicles described in specific embodiment 1. Steps 3 and 5 are based on the input total power and output total The concrete method of calculating the real-time total efficiency value η1=η(k1) when the torque distribution coefficient k=k1 and the real-time total efficiency value η2=η(k2) when the torque distribution coefficient k=k1 is as follows:
[0050] By formula:
[0051]
[0052] Calculate and obtain the real-time efficiency η of the front right wheel drive motor 1-1 1_1 (i), where P in,1 (i) is the input power of the front right wheel drive motor at time i, P out,1 (i) is the output power of the front right wheel drive motor at time i, U 1 (i) is driving front right wheel motor controller 1-2 input terminal bus voltage at i moment, I 1 (i) is the bus current at the input end of the front right...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More