

Disturbance rejection control method for unmanned aerial vehicle suspension loading system
A technology of load system and control method, which is applied in general control system, attitude control, adaptive control, etc., can solve the problem of robust control research of multi-rotor UAV suspension load system, cannot guarantee the system control effect, and does not consider system control Accuracy and robustness issues and other issues, to achieve superior UAV position control accuracy and suspension load swing angle suppression effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to overcome the deficiencies of the prior art, the invention aims to propose a set of nonlinear robust control algorithm for the suspension load system of the multi-rotor UAV, so as to improve the control robustness and control accuracy of the system under strong alternating wind disturbance. The technical scheme adopted by the present invention is to design a disturbance observer to estimate the translational disturbance force acting on the body of the rotor UAV in real time, and to design a nonlinear robust controller with a disturbance compensation mechanism. The method includes the following contents:
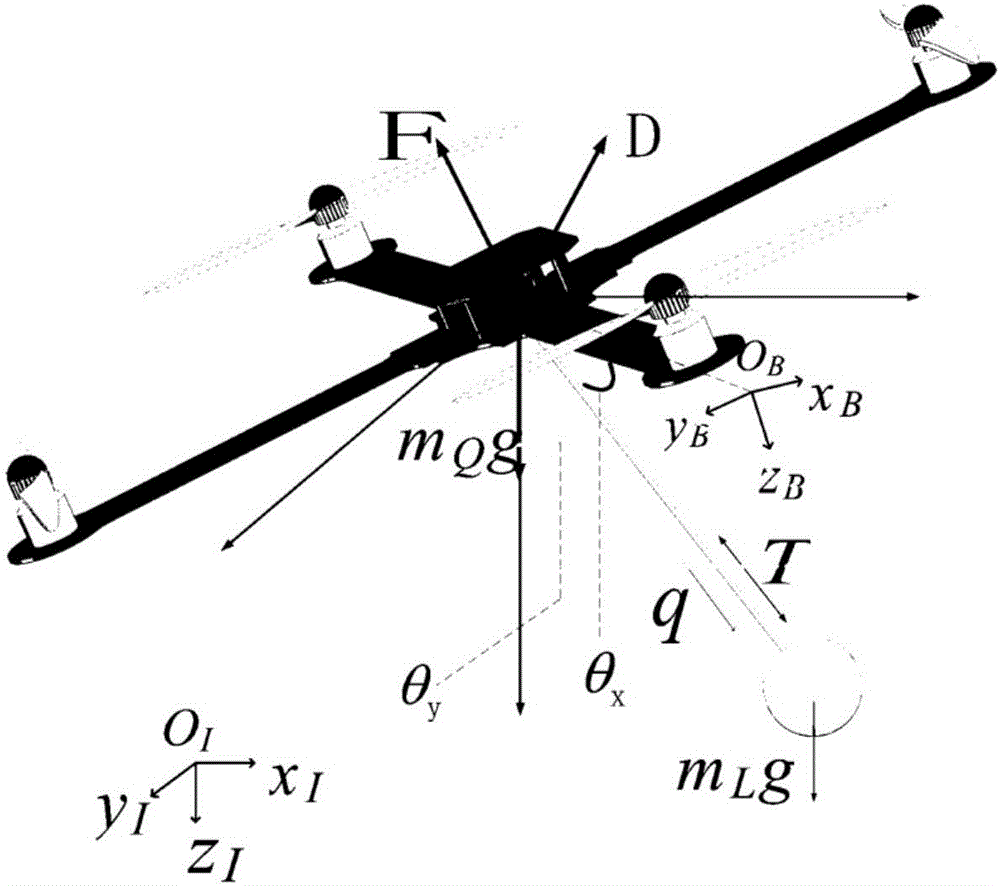
[0038] Steps to build the kinematic model of the multi-rotor UAV suspension load system:
[0039] The schematic diagram of the suspension load system of a multi-rotor UAV (taking a quad-rotor UAV as an example) is as follows: figure 1 shown. I represents the inertial coordinate system, B represents the UAV body coordinate system, and p Q =(x Q ,y Q ,z ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More