

Multi-robot distributed task assignment formation method facing dynamic task
A distributed task and multi-robot technology, applied in the field of dynamic task-oriented multi-robot distributed task distribution, can solve problems such as ineffectiveness, inability to implement scheduling, and inability to meet real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
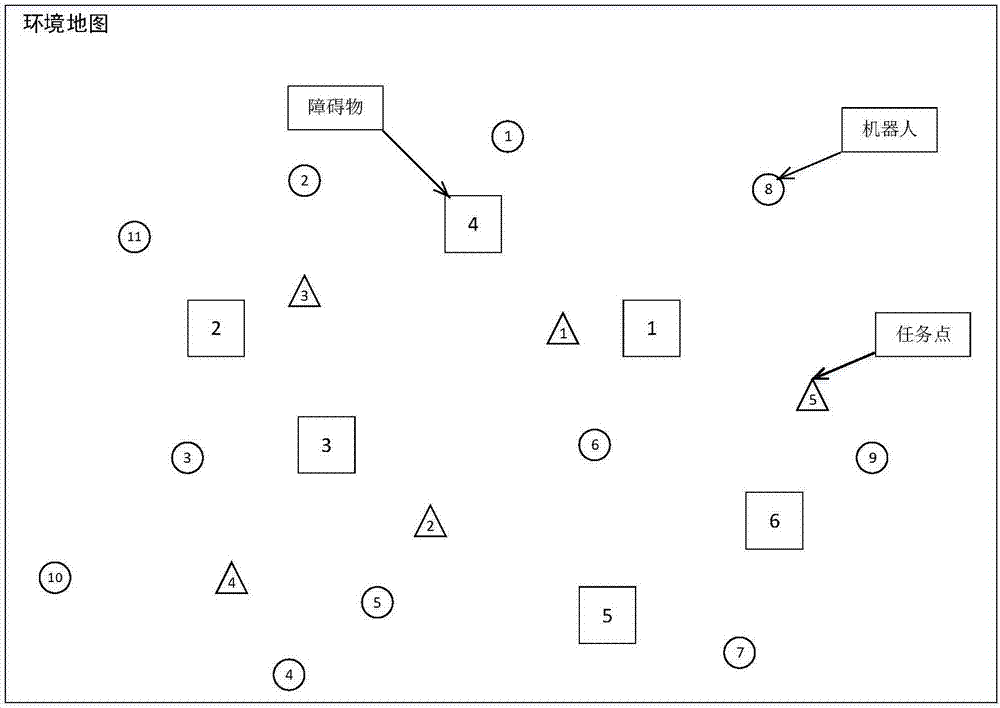
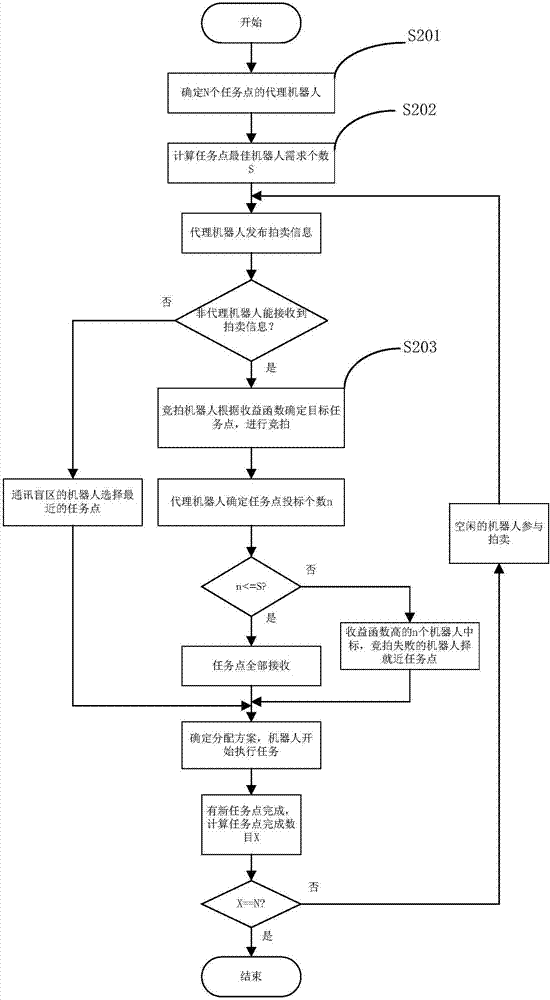
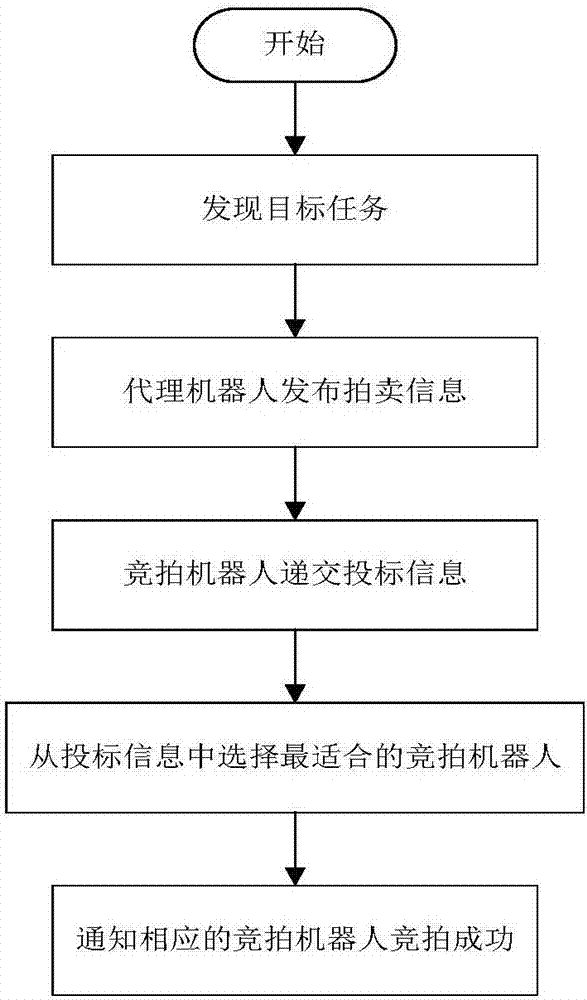
[0087] The invention provides an improved auction algorithm, combined with the A-star algorithm path optimization, and solves the problem of multiple dynamic tasks in the environment through cooperation among robots.
[0088] The multi-stage auction algorithm is improved on the basis of the traditional auction algorithm, adding corresponding rules and dynamic revenue functions. The traditional auction algorithm is suitable for solving the allocation problem of static target tasks, and measures the value of the target task and the execution cost of the robot through the benefit and cost parameters, designs the auction algorithm for each robot for the target task, and genera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More