

Quintic polynomial trajectory planning method of industrial robot
A quintic polynomial, industrial robot technology, used in instruments, simulators, computer control, etc., can solve problems beyond the limits of robot motion parameters, and achieve the effect of continuous speed and acceleration, continuous acceleration and jerk, and smooth planning curve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
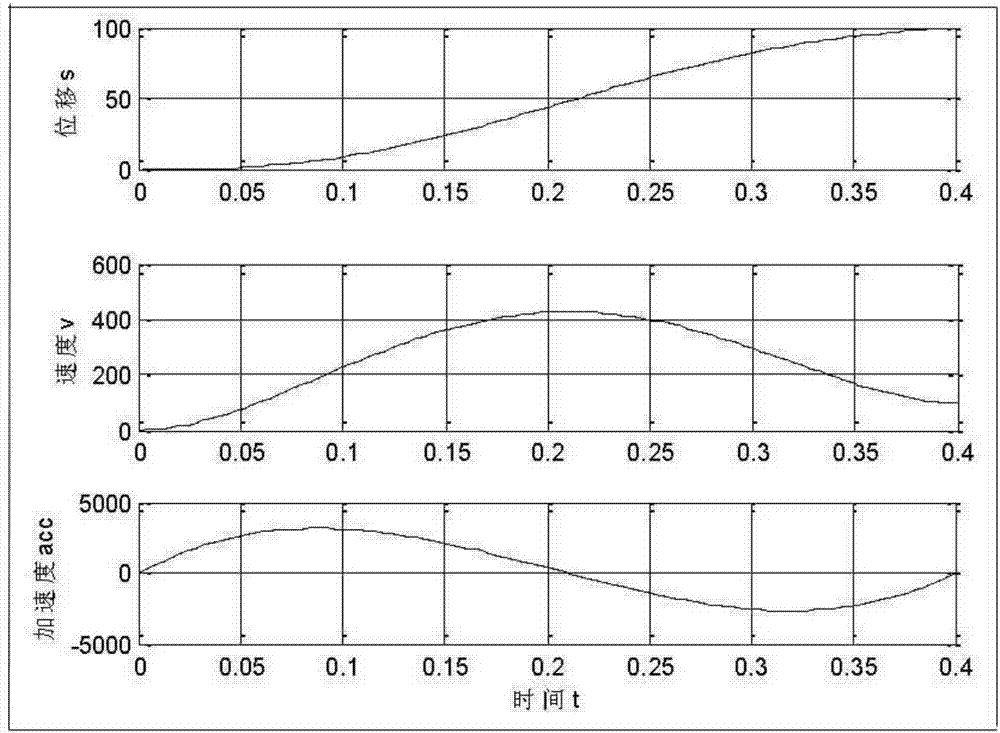
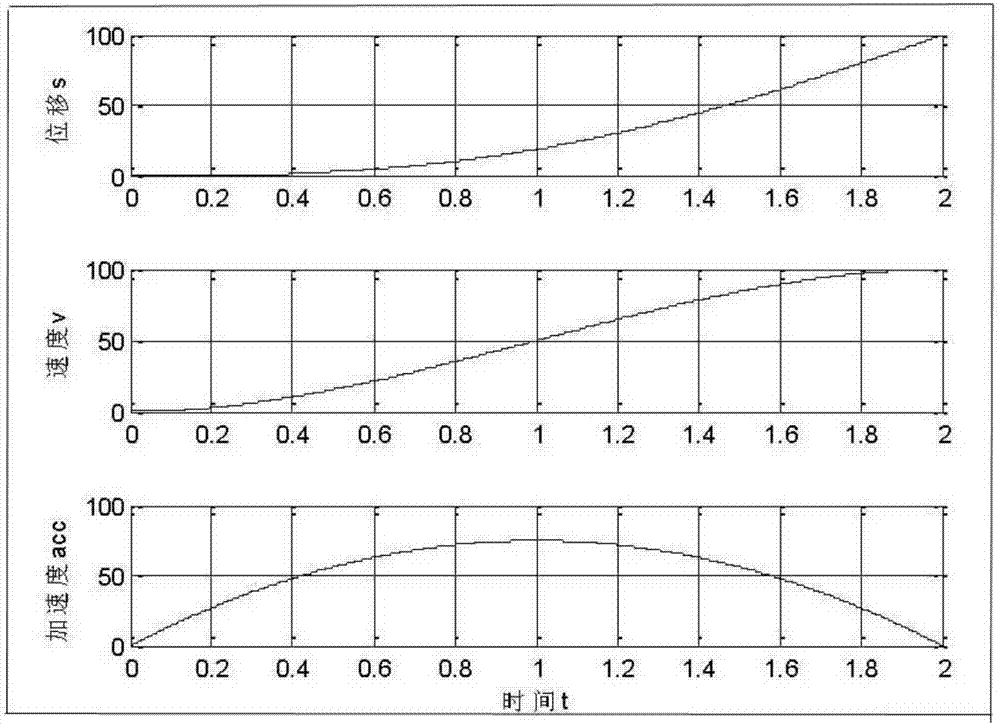
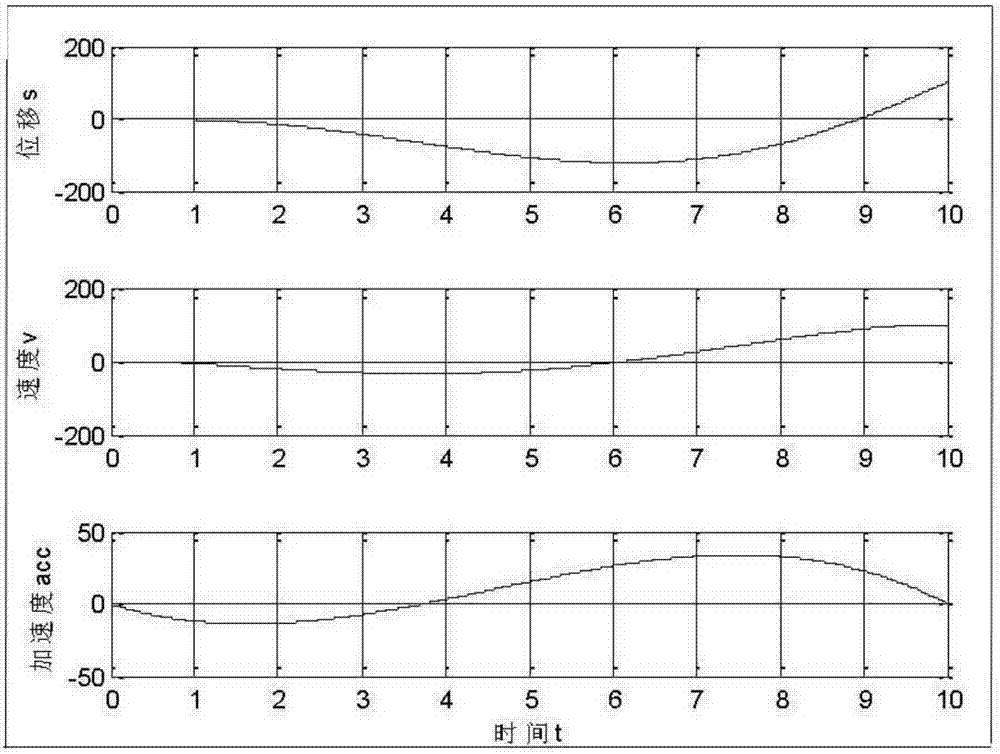
[0042] Taking the transition between straight lines of an industrial robot as an example, quintic polynomial trajectory planning is used.
[0043] 1. Determine the starting and ending displacement, velocity and acceleration information of the trajectory
[0044] The trajectory preprocessing module determines the effective starting and ending displacement, velocity and acceleration information of the trajectory according to the taught start and stop position points, combined with the inherent motion parameter limitations.
[0045] the s 0 = 0, v 0 =20, acc 0 = 0;
[0046] the s e = 100, v e =82, acc e =0.
[0047] 2. Determine the interpolation time of the fifth planning
[0048] The interpolation time determined by formula (3) is 1.961s. Since the fine interpolation period of the system is 0.004s, the interpolation time is taken as an integer multiple of the fine interpolation period and rounded up to determine the fifth planning interpolation time t e = 1.964s.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More