

Supervision and control method for UAV threat avoidance by manned vehicle
A control method and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve problems such as overload and loss of perception
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
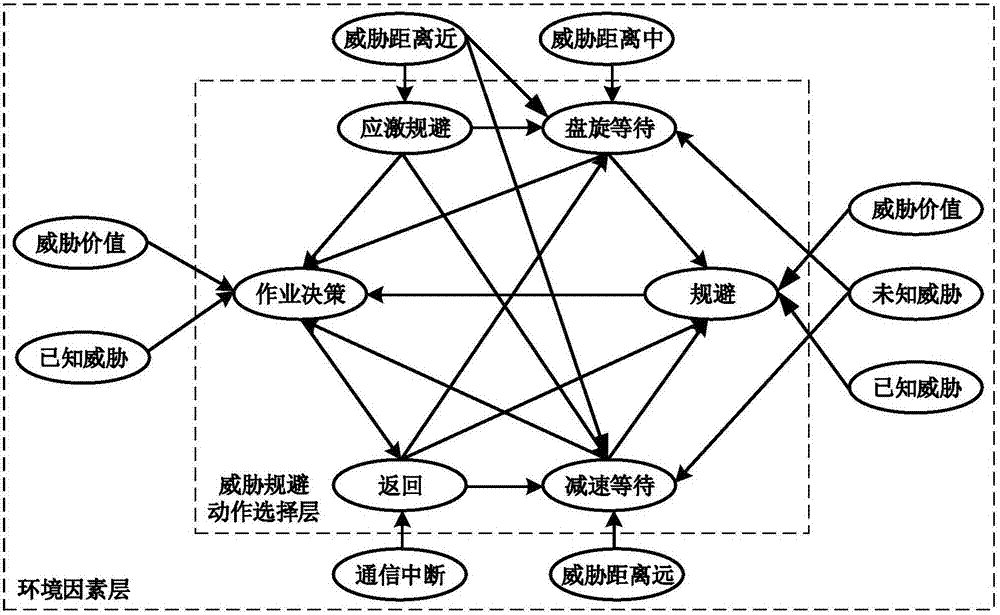
[0174] Step1: Define the supervisory control mode, environmental factors and threat avoidance actions
[0175] It can be seen from Table 5 that if the threat type is a known threat, then V6=1 and V3=0; if the threat value is high, then V7=1; if the threat distance is medium, then V4=0 and V2=1 and V1=0; if the communication is normal, Then V5=0. In addition, A1~A6 are initially 0, and the initial supervisory control mode is the exception management mode L3;
[0176] Step2: Reasoning and judgment of optional threat avoidance actions
[0177] The state vector is:
[0178]
[0179] Iterate it, and the output state vector is:
[0180]
[0181] The output results show that the optional actions of the UAV in Embodiment 1 are avoiding A2 and hovering and waiting for A4.
[0182] The UAV provides optional threat avoidance action results avoiding A2 and hovering and waiting A4 to the manned aircraft.
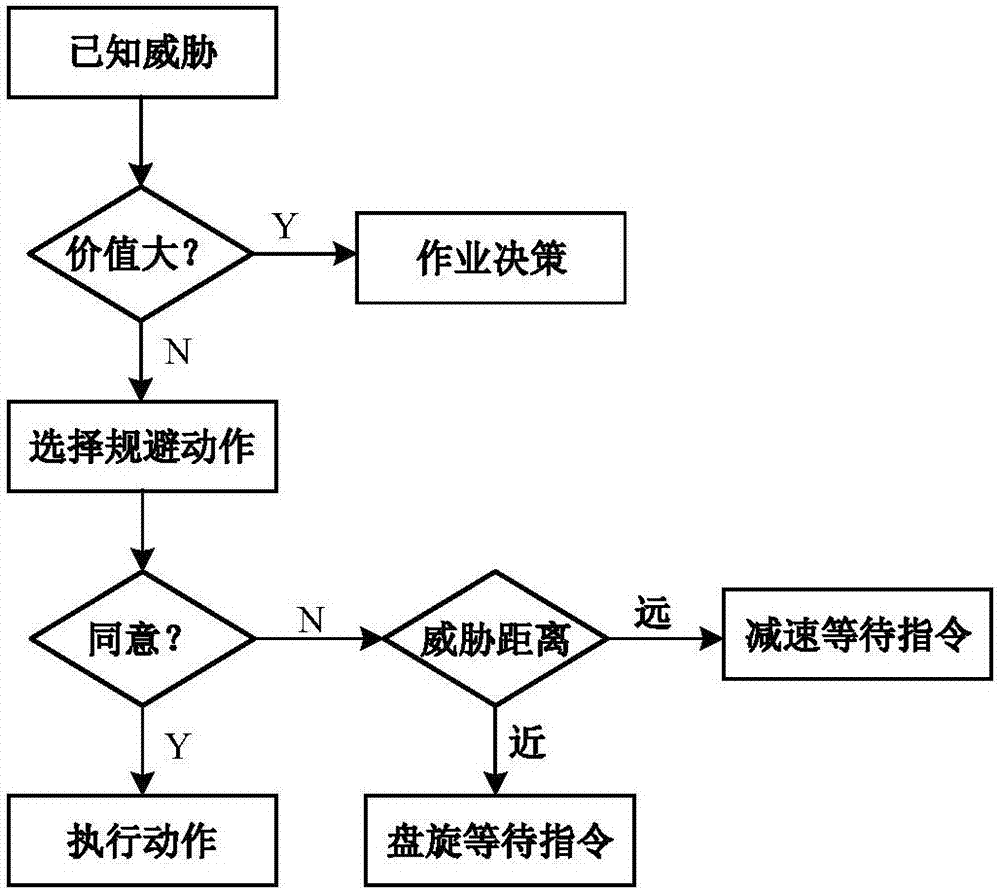
[0183] Step3: Final threat evasion action judgment
[0184] From Table 1...
Embodiment 2
[0189] Step1: Define the supervisory control mode, environmental factors and threat avoidance actions
[0190] It can be seen from Table 5 that if the threat type is an unknown threat, then V3=1 and V6=0; There is V5=0. In addition, A1 to A6 are initially 0, and the initial supervisory control mode is the exception management mode L3.
[0191] Step2: Reasoning and judgment of optional threat avoidance actions
[0192] The state vector is:
[0193]
[0194] Considering that the threat value is unknown (V7=-1), the information is incomplete, and the UAV cannot make a judgment, so it needs to interact with the manned machine.
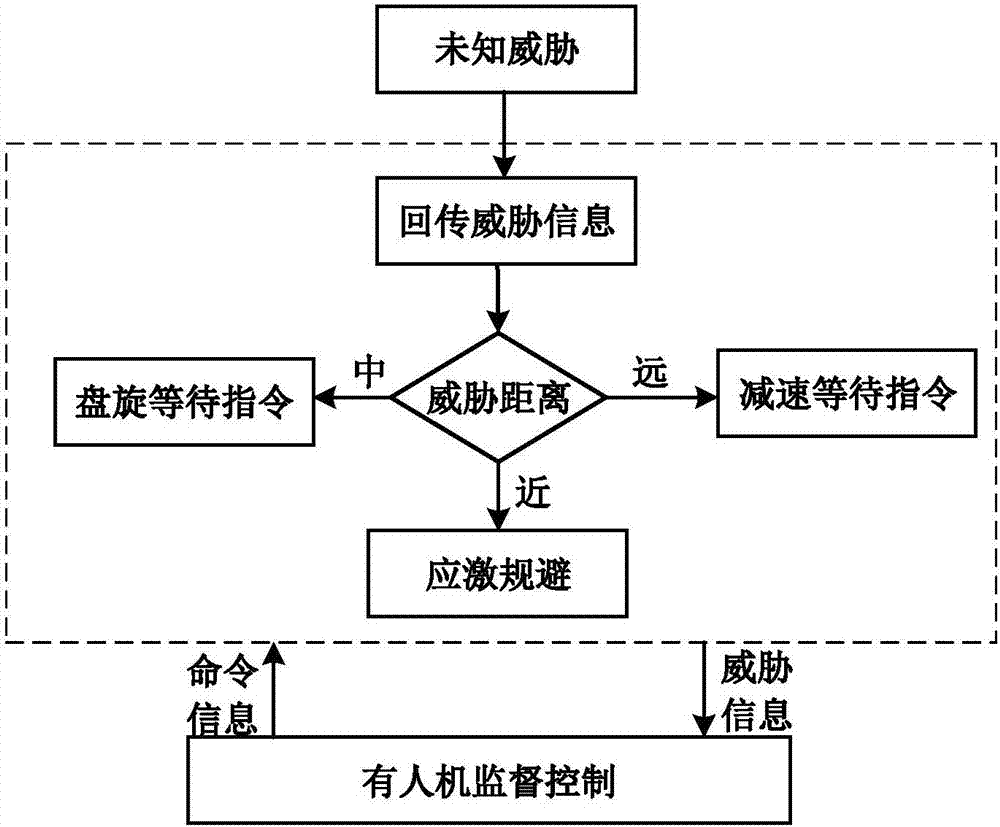
[0195] Step3: Final threat evasion action judgment
[0196] Judgment condition b) of the situation that UAV needs to interact with man-machine is established, that is, the environmental factor contains unknown threat V3 and the value is "1". At this time, the UAV cannot make a judgment and cannot provide threat avoidance to man-machine in time The ...
Embodiment 3
[0210] Step1: Define the supervisory control mode, environmental factors and threat avoidance actions
[0211] It can be seen from Table 5 that if the threat type is an unknown threat, then V3=1 and V6=0; if the threat value is unknown, then V7=-1 (-1 means that the threat value is unknown); if the threat is far away, then V4=1 and V2=0 And V1=0; communication is normal, there is V5=0. In addition, A1 to A6 are initially 0, and the initial supervisory control mode is the exception management mode L3.
[0212] Step2: Reasoning and judgment of optional threat avoidance actions
[0213] The state vector is:
[0214]
[0215] Considering that the threat value is unknown (V7=-1), the information is incomplete, and the UAV cannot make a judgment, so it needs to interact with the manned machine.
[0216] Step3: Final threat evasion action judgment
[0217] The UAV cannot complete the threat avoidance decision independently, and at the same time, due to the interruption of comm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More