

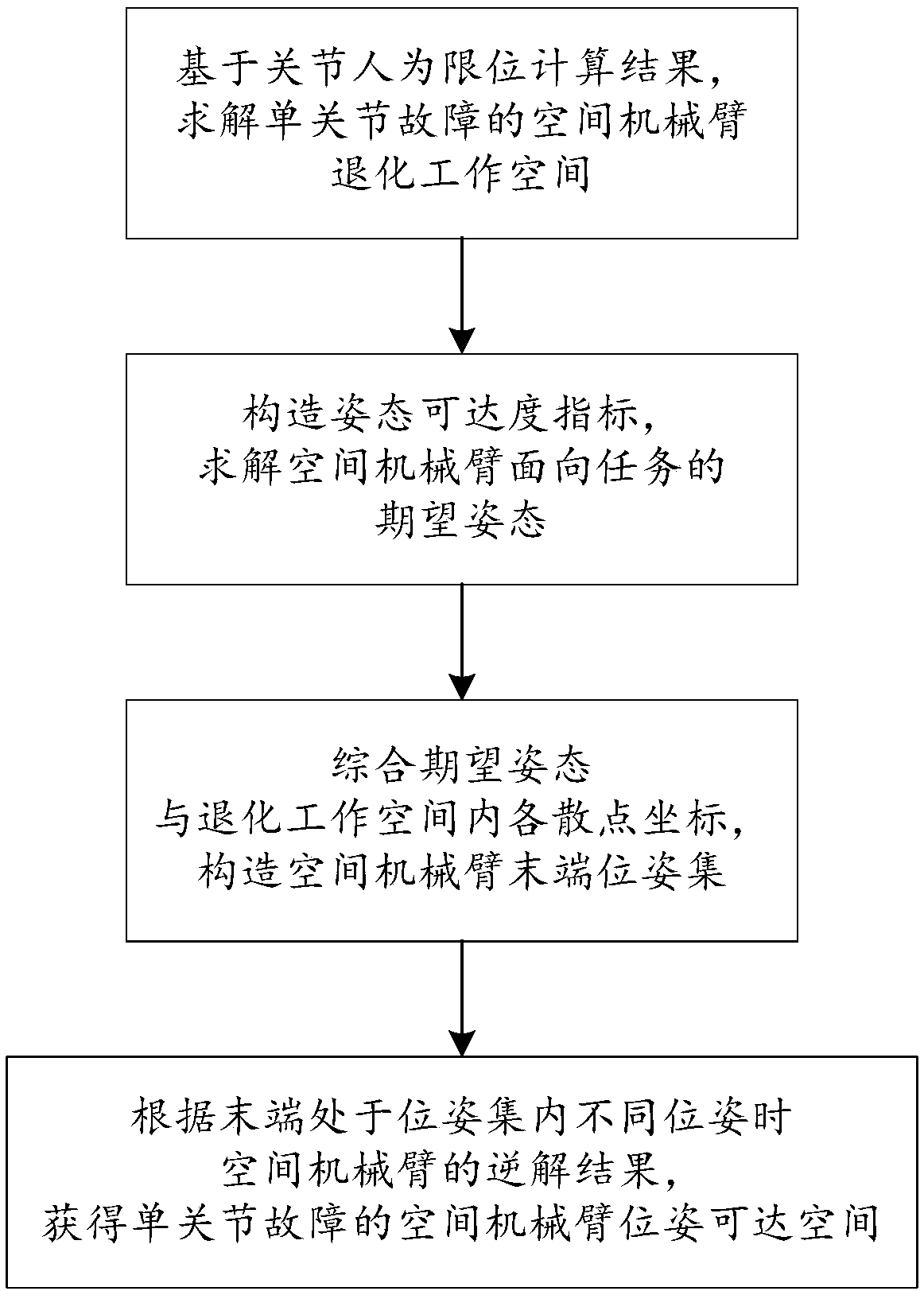
Single-joint fault space manipulator pose reaching space solving method
A space manipulator, fault space technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem that the degraded workspace does not have terminal attitude accessibility, the space manipulator cannot complete tasks, and affects the space operation of the space manipulator. tasks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
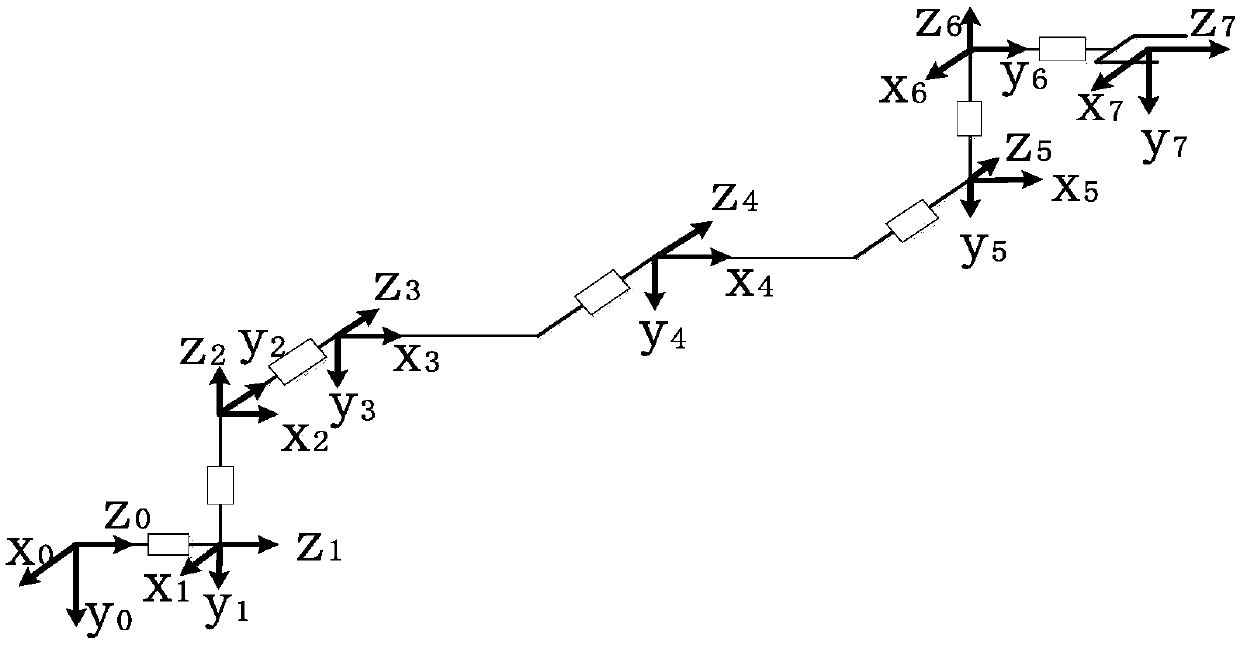
[0065] 1. Establish the kinematics model of the seven-degree-of-freedom space manipulator as follows: figure 2 The corresponding D-H parameters are shown in Table 1.
[0066] Table 1 D-H parameters corresponding to the initial configuration of the seven-degree-of-freedom space manipulator
[0067]
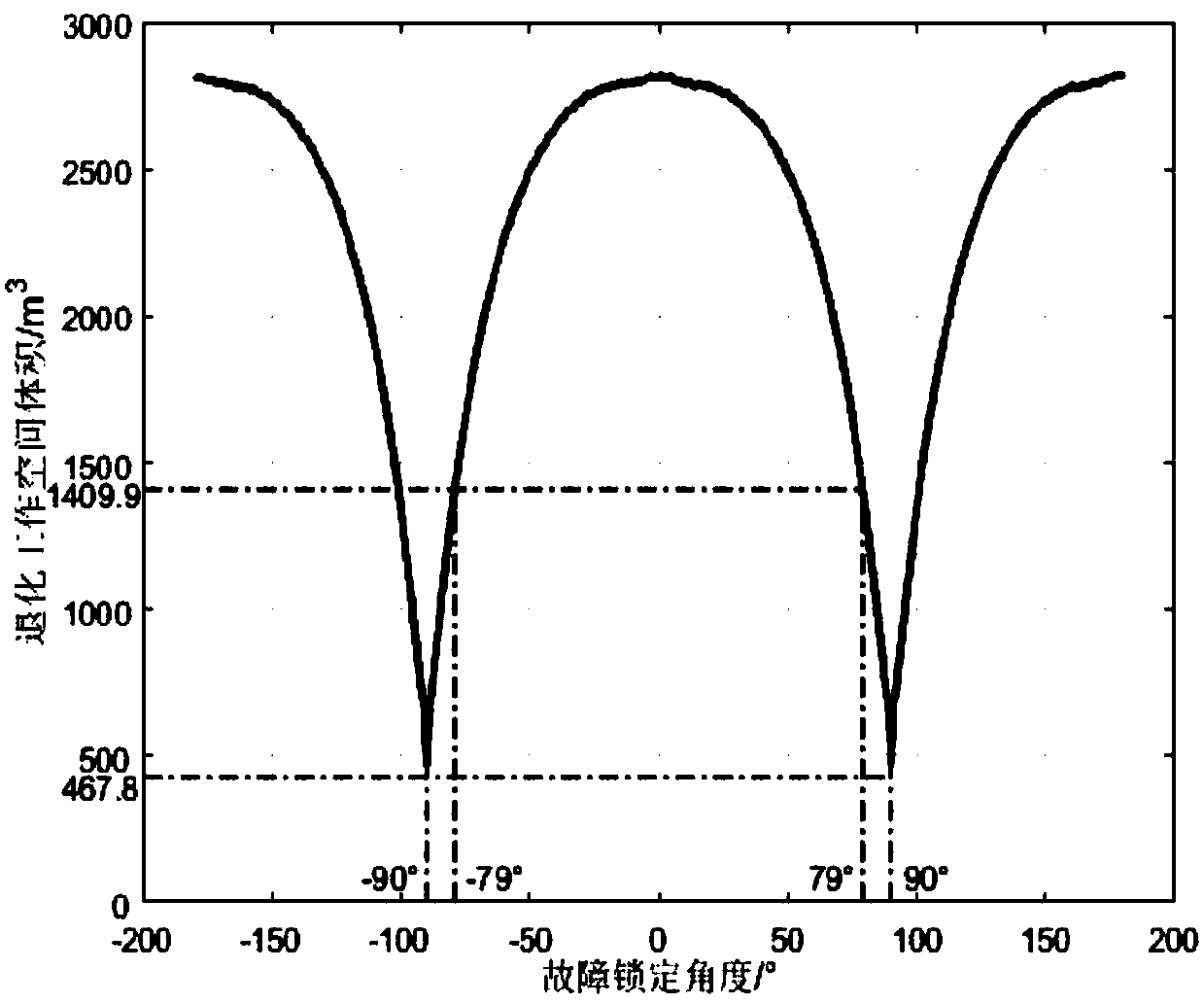
[0068] 2. Solve the artificial limit of each joint of the space manipulator based on the Newton-Raphson method, let υ = 1°, take and The trade-off threshold ζ=40%; the initial artificial limit of each joint of the space manipulator is the corresponding physical limit Then, based on the Monte Carlo method, by generating N=200,000 space scattered points, the degenerated workspace volume of the space manipulator when each joint is locked at different angles can be obtained Furthermore, the initial solution of the artificial limit of each joint can be completed through formula (6), and the iterative solution is continued based on the initial solution result until the value o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More