

A multi-UAV formation self-organization cooperative control method based on rigid graph theory
A technology of cooperative control and multi-UAV, applied in the field of UAV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the examples, but it should be noted that the examples do not limit the protection scope of the present invention.
[0073] In order to overcome the deficiencies of the existing technology, the embodiment of the present invention provides a multi-UAV formation self-organization cooperative control method based on a rigid graph, which solves the coordination of the UAV formation and solves the problem of obstacle adaptability, while ensuring the network security. connectivity.
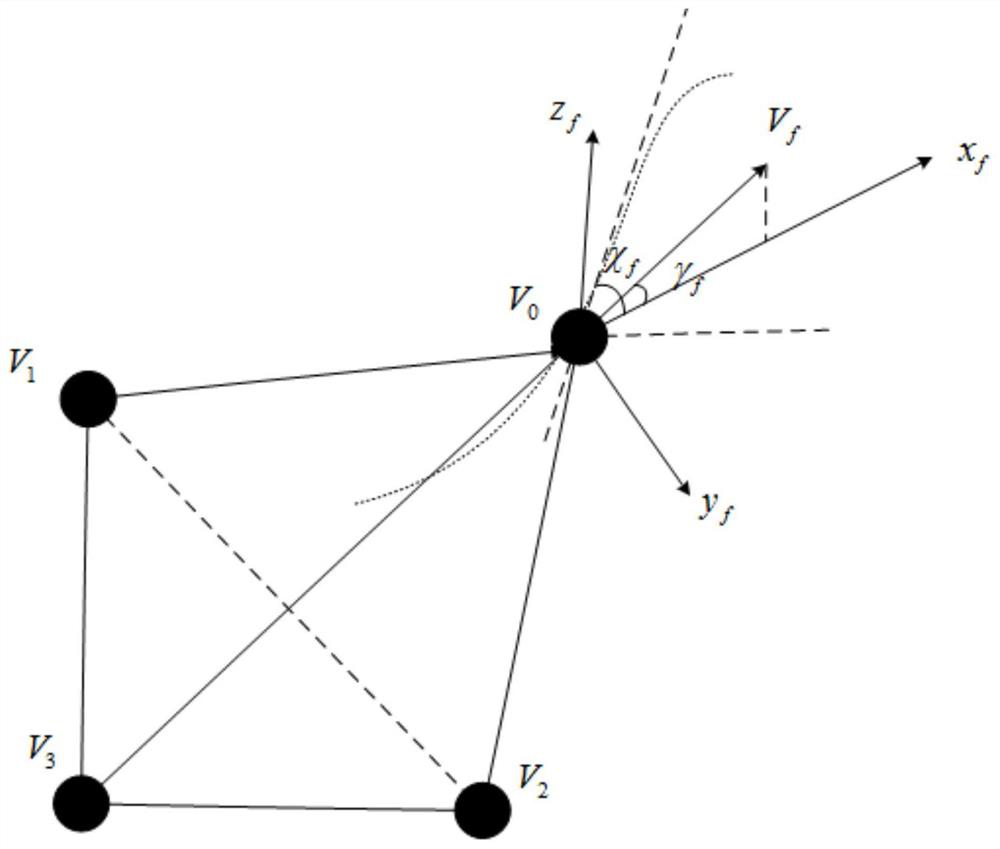
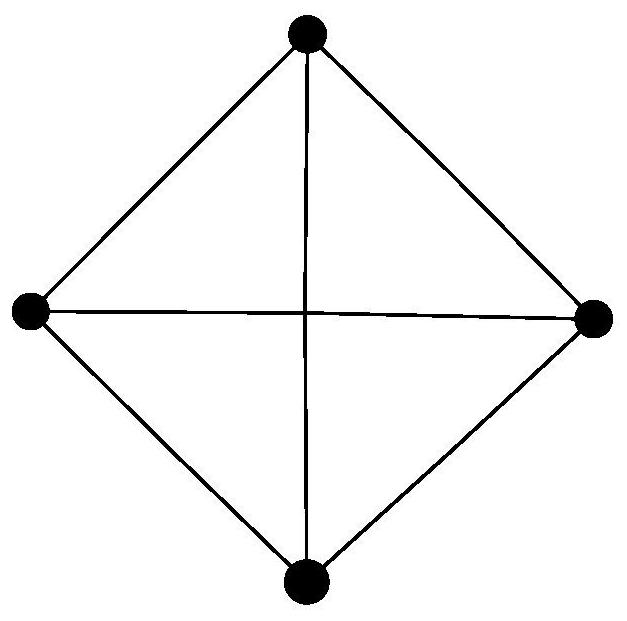
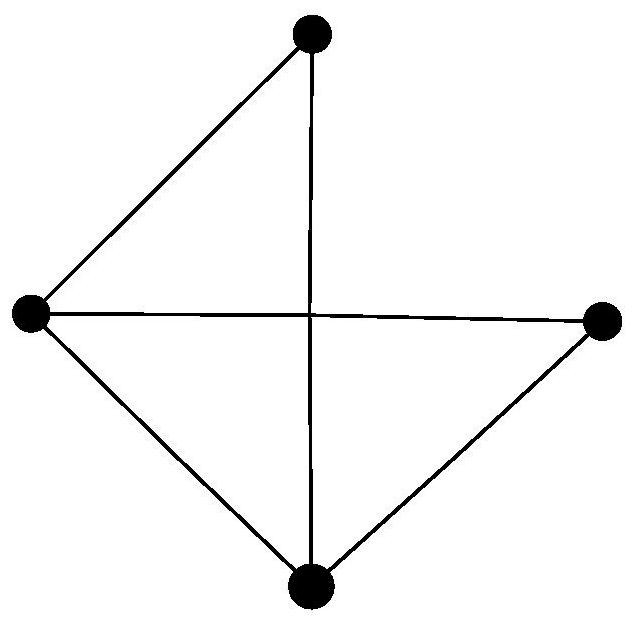
[0074] In order to implement the multi-UAV formation self-organizing cooperative control method based on the rigid graph in the embodiment of the present invention, first, the steps that need to be performed are to construct the multi-UAV self-organizing formation based on the rigid graph, wherein the UAV formation passes Neighbor information exchange builds a network topology, which is represented by an undirected graph G(...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More