

Multi-node information fusion method and system for airborne distributed pos
A fusion method and distributed technology, applied in navigation, instrumentation, surveying and navigation, etc., can solve problems such as lack of rationality, failure to consider lever-arm effect, installation error, etc., and achieve the effect of improving measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
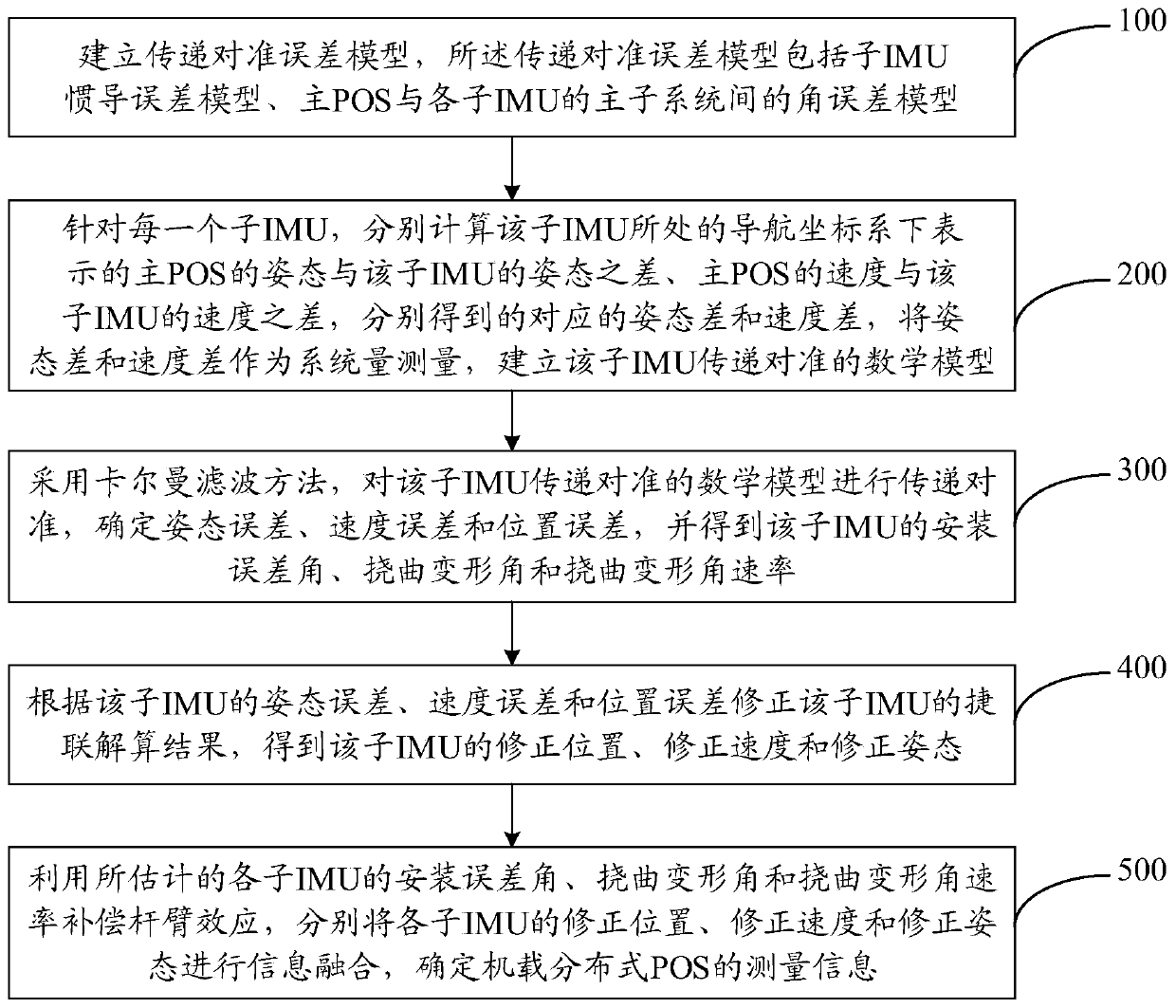
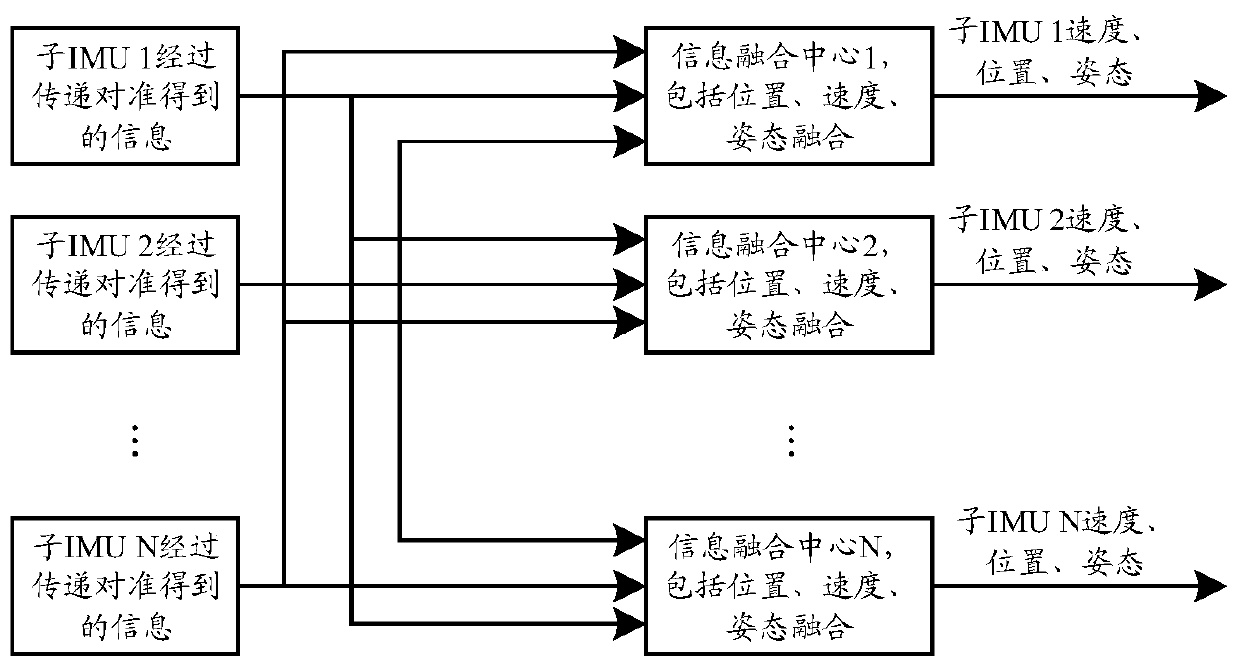
[0032] The purpose of the present invention is to provide a multi-node information fusion method of airborne distributed POS, by establishing a transfer alignment error model, a mathematical model of sub-IMU transfer alignment, and using a Kalman filter method to transfer alignment to the sub-IMU The mathematical model of the sub-IMU is transferred and aligned to obtain the attitude error, velocity error and position error of the sub-IMU, as well as the install...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More