AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A robot and cylinder technology, applied in the field of bionic robots, can solve problems such as swinging back and forth and left and right without consideration
Inactive Publication Date: 2019-05-03
JIAXING UNIV
View PDF12 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
The above-mentioned humanoid robot does not consider the back and forth swing and left and right swing between the upper and lower limbs driven by the waist joint, and the multiple combinations of multiple cylinders to drive the joint movement
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0025] The present invention will be described in detail below according to the accompanying drawings and preferred embodiments, and the purpose and effect of the present invention will become clearer. The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
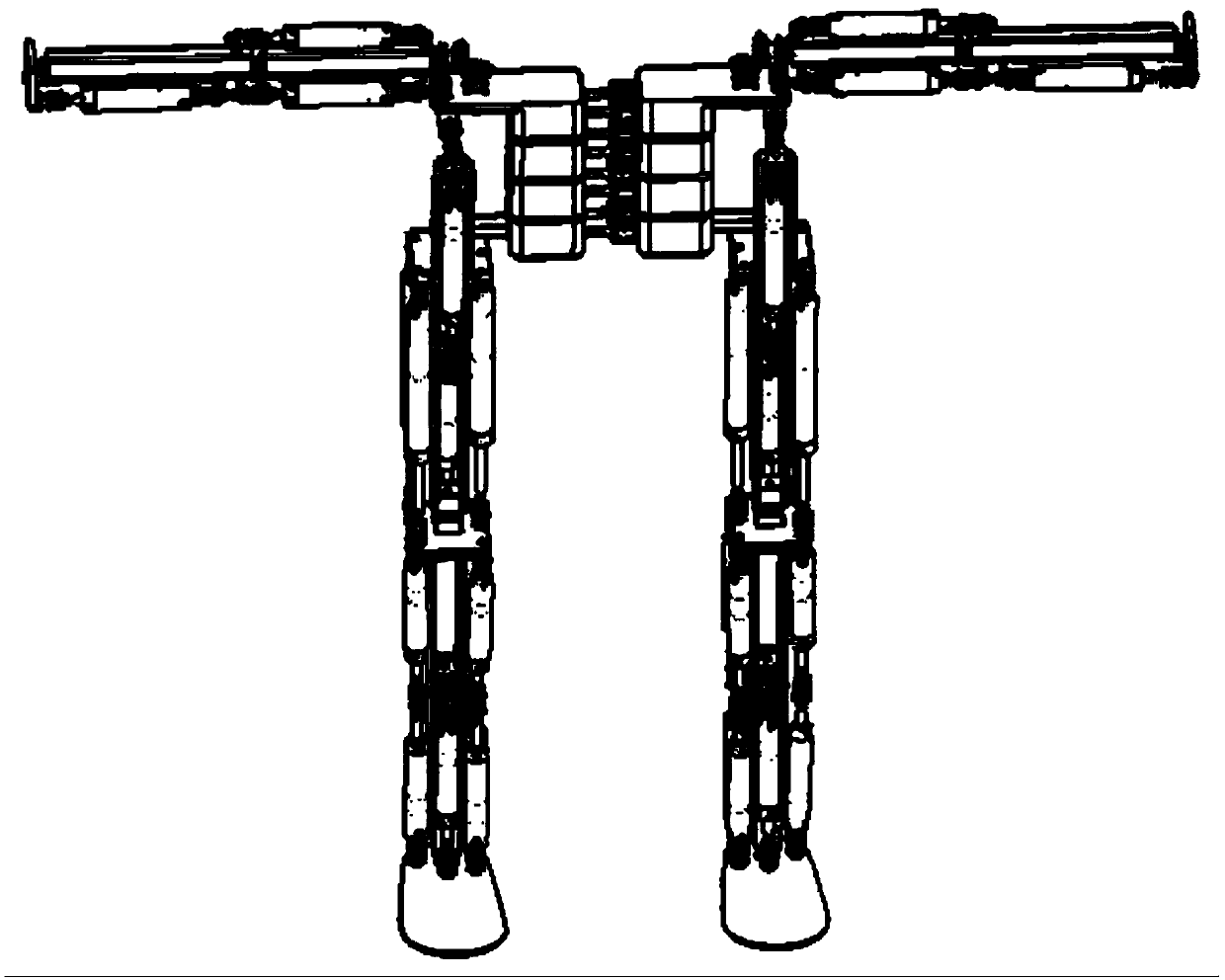
[0026] A cylinder-based humanoid robot such as figure 1 As shown, the robot includes two upper limbs, a waist joint and two lower limbs, the two upper limbs are symmetrically and rotatably connected to both ends of the upper part of the waist joint, and the two lower limbs are symmetrically and rotatably connected to the lower part of the waist joint; The structure of the two upper limbs is the same, and the structure of the two lower limbs is the same;
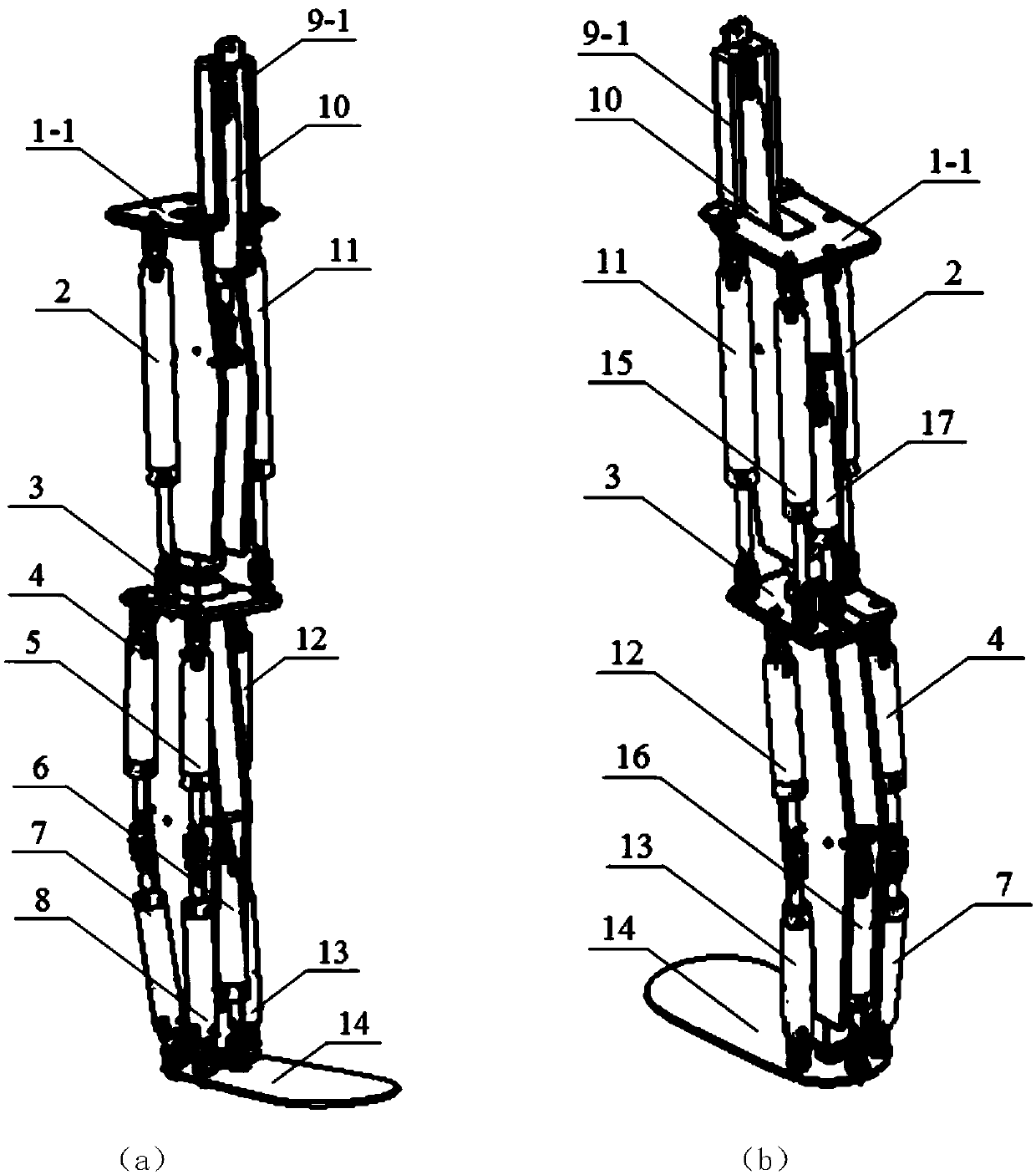
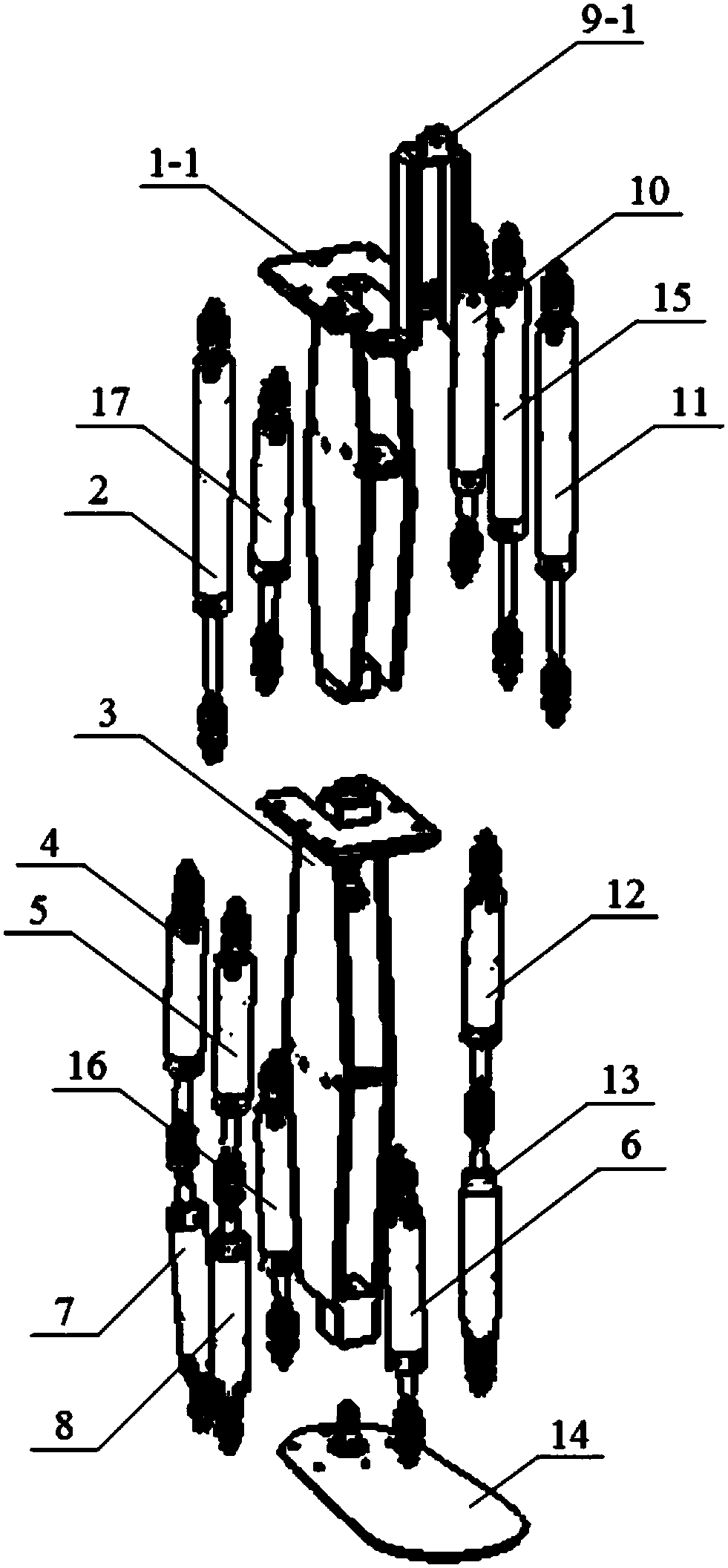
[0027] Take the right lower limb as an example...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a humanoid robot based on air cylinders. The humanoid robot is used for driving the movement of hip joints, knee joints, ankle joints, waist joints, shoulder joints, elbow joints and wrist joints of the robot and has the function of completely simulating the movement of human. The humanoid robot mainly comprises humeri, ulnae, thigh fixing parts, the air cylinders, shank fixing parts, waist joint connecting parts, feet, bevel gears, bearings, connecting plates, supporting plates and connecting shafts, the air cylinders of the lower limb knee joints, the ankle joints, the upper limb elbow joints and the wrist joints are combined in a plurality of modes to drive the joints to achieve the bending and stretching, folding and unfolding and annular rotating functions, thehip joints have the bending and stretching movement functions, the rotating air cylinders drive the bevel gears to mesh so that the shoulder joints can achieve the annular rotating movement function,the air cylinders of the waist joints drive the joints to achieve the front-and-back and left-and-right swinging, bending and stretching, folding and unfolding and annular rotating functions, and meanwhile, upper limbs and lower limbs are driven to swing front and back and swing left and right. The humanoid robot is driven by the air cylinders and has the advantages of being compact in structure,clean, good in anti-explosion performance and capable of being used for teaching, explosive ordnance disposal and exhibition.
Description
technical field [0001] The invention belongs to the technical field of bionic robots, in particular to a cylinder-based humanoid robot. Background technique [0002] Since the 1960s, many researchers at home and abroad have begun to study motor-driven humanoid robots to replace humans to complete dangerous and heavy work. So far, motor-driven humanoid robots have developed relatively maturely. The cylinder uses clean air as the medium, and has a good explosion-proof type. The air has the advantages of being inexhaustible and inexhaustible. At the same time, the cylinder has a large movement space, and the cylinder has been widely used in the industrial field. Cylinders can be divided into linear motion cylinders and rotary motion cylinders according to the motion mode, both of which can be used to drive robot joints. Robots driven by cylinders will have a broad application prospect. At present, the research on humanoid robots driven by cylinders is basically in a blank stat...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More