

Pneumatic profiling robot system
A robot system and pneumatic muscle technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of small movement space, large singularity, poor stiffness, etc., and achieve good flexibility, high power/mass ratio, and compact structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
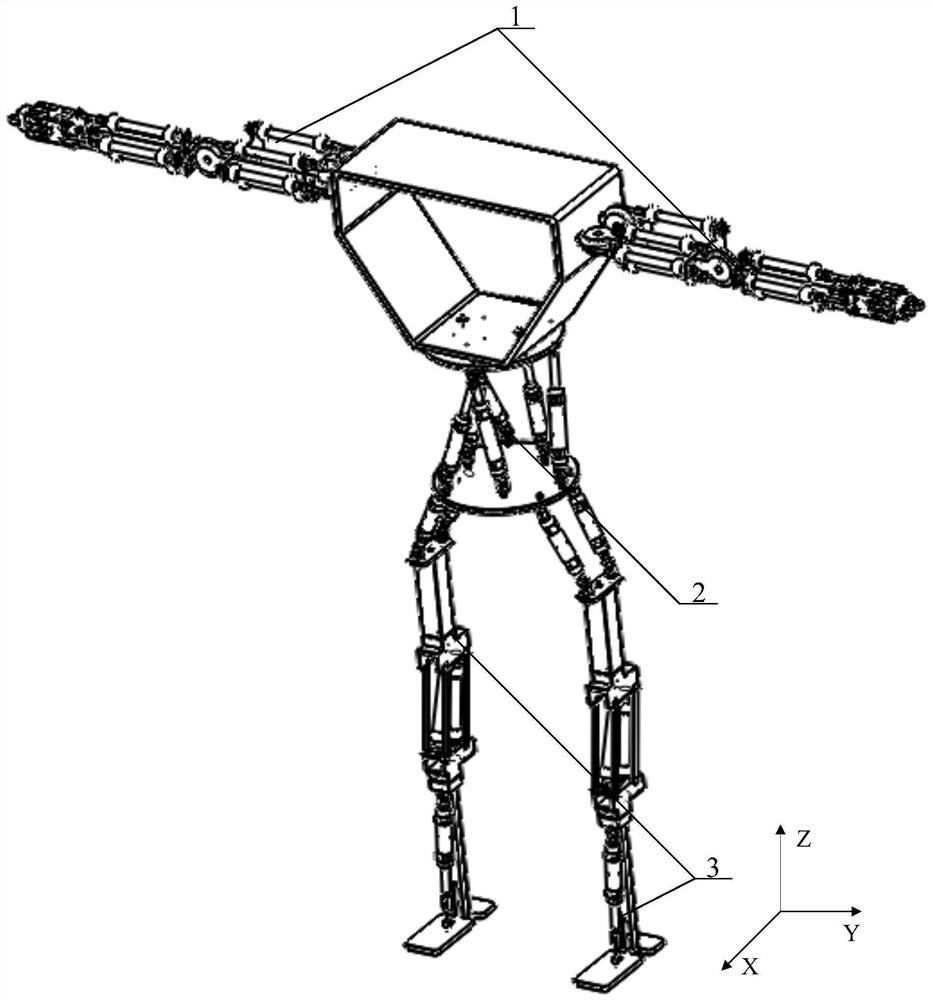
[0041] A pneumatic profiling robot system, comprising: a waist joint 2, upper limb joints 1 that are mirror images of each other are arranged on both sides of the waist joint 2, and lower limb joints 3 that are mirror images of each other are respectively arranged on the lower part; the lower end of the chest support member 36 of the waist joint 2 The upper panel 21 of the waist joint is fixedly connected, and the upper panel 21 of the waist joint and the lower panel 4 of the waist joint are respectively rotatably connected to the two ends of the cylinder two 22, the three cylinders 23, the four cylinders 24, the five cylinders 25, the six cylinders 26, and the seven cylinders 27;
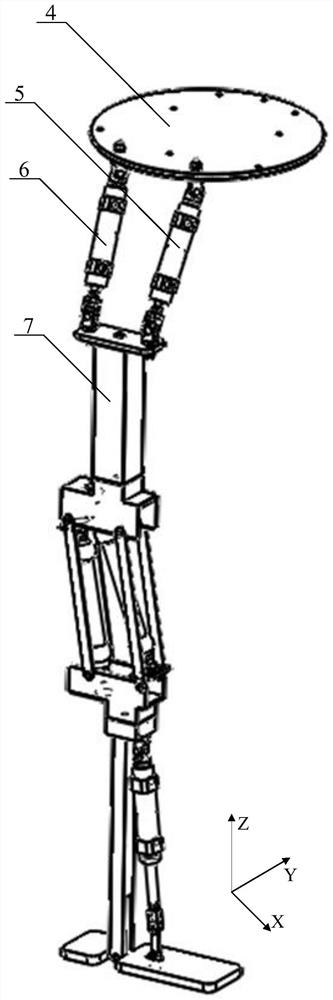
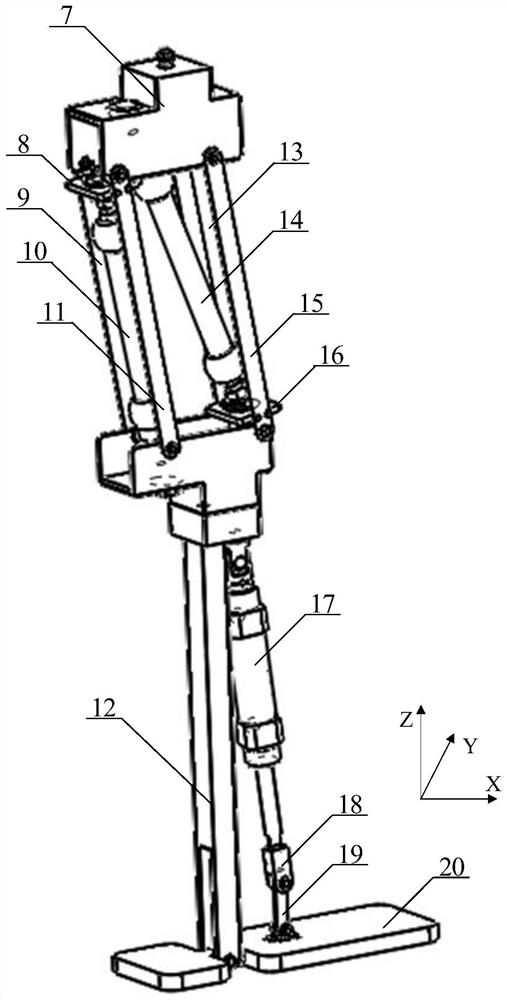
[0042] The lower end of the lower panel of the waist joint 4 is rotatably connected to the first hip joint cylinder 5 and the second hip joint cylinder 6 of the lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More