

Four-freedom-degree wearable upper limb exercise auxiliary device with optimized freedom degree
An auxiliary device and degree of freedom technology, applied in sports accessories, passive exercise equipment, physical therapy, etc., can solve problems such as bulky robotic arms, unfavorable portable and wearable design of robotic arms, and increased control complexity, so as to avoid The effect of arm length adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
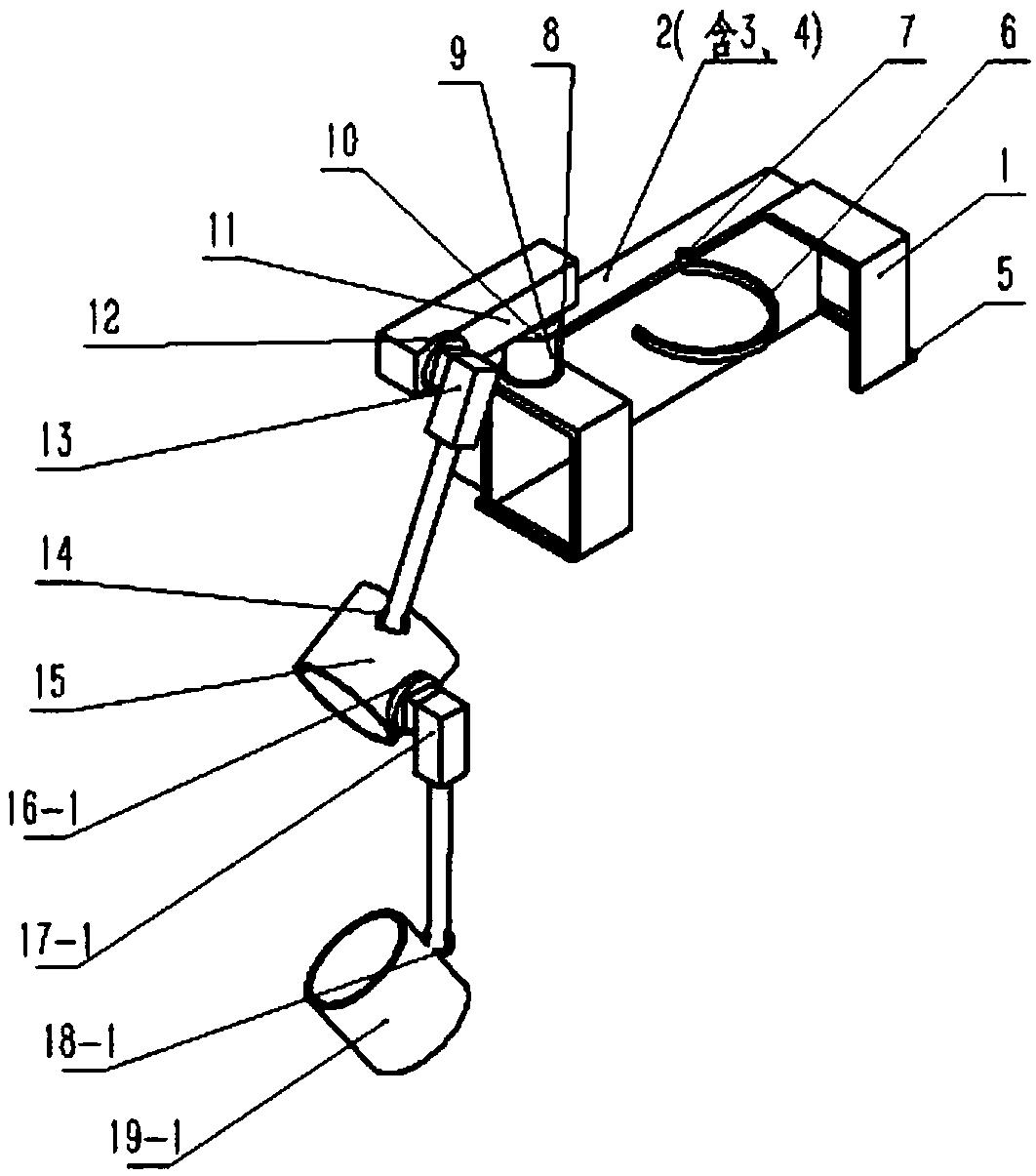
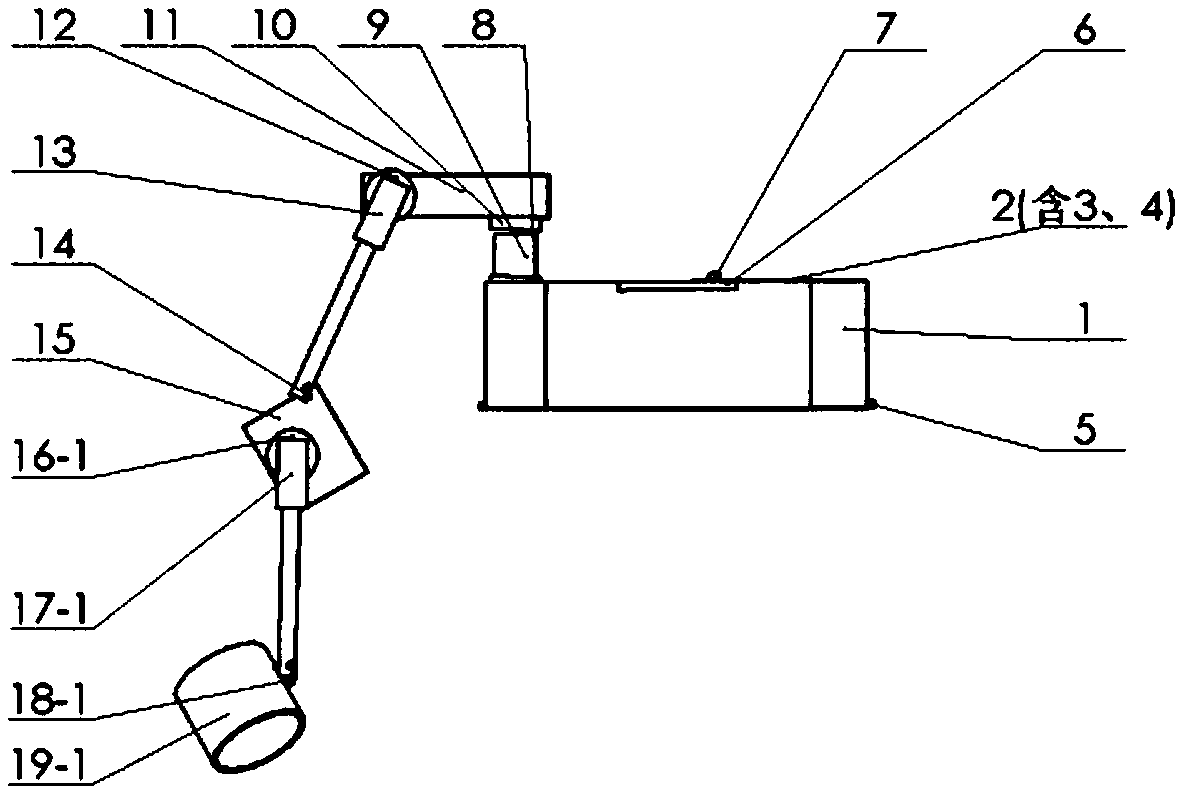
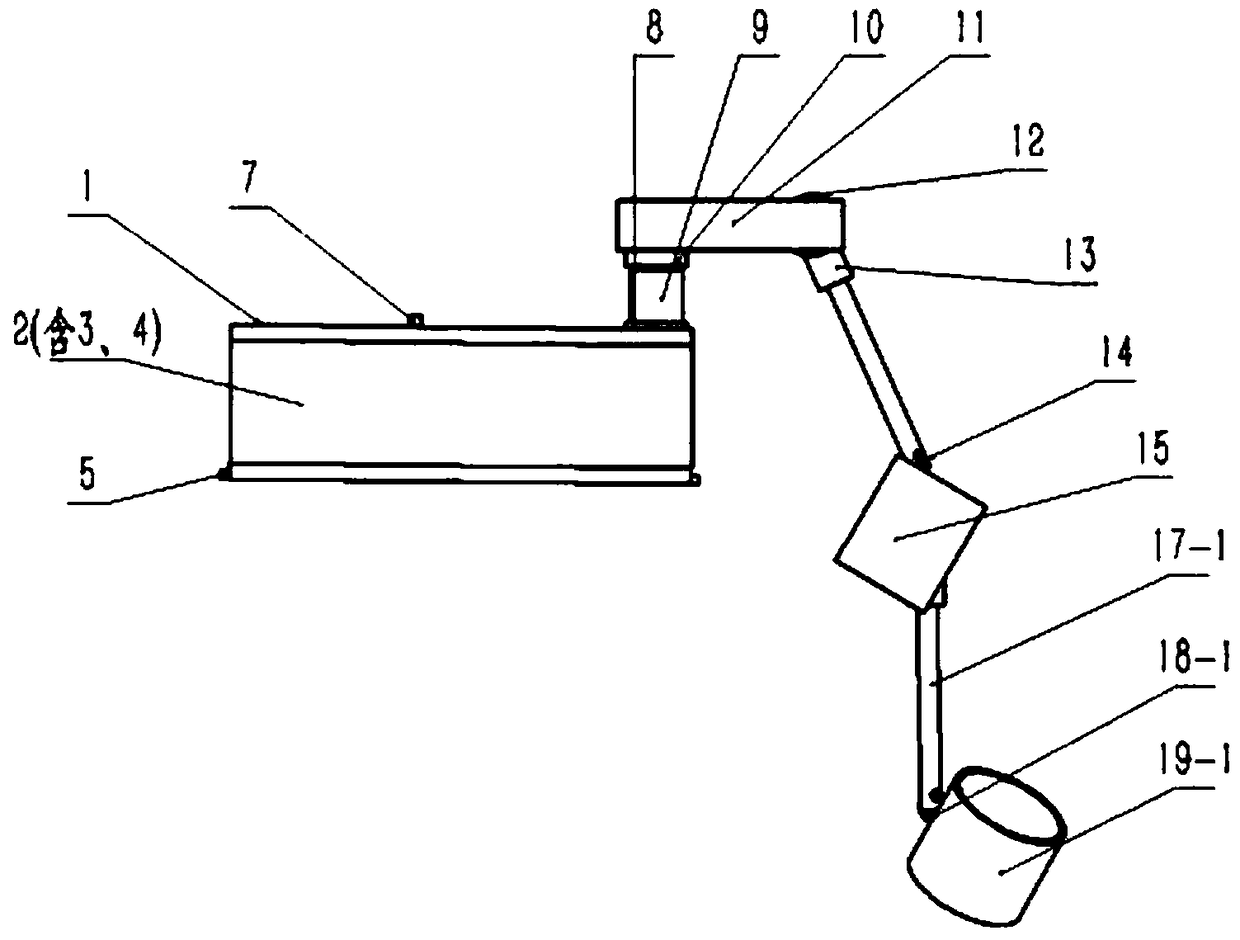
[0031] refer to Figure 1a-1c And 2a-2c, the present invention mainly comprises shoulder and back fixing module, upper arm auxiliary module and forearm auxiliary module; Shoulder and back fixing module comprises shoulder and back fixing bracket 1, backpack module 2, drive control module 3 and power supply that are arranged in backpack module 2 The module 4 is composed of the shoulder turntable motor 9, the first electric push rod 13, and the second electric push rod 17-1 to form the most basic structural form. In the figure, the upper arm auxiliary module includes a motor base 8, a shoulder turntable motor 9, a fixed connector 10, a load-bearing pole 11, a first turntable base 12, a first electric push rod 13, and a first upper arm fixing sleeve 15. The output end of the first electric push rod 13 is connected to a point on the first upper arm fixed sleeve 15 through the first single-ended fixed rotating shaft or the first suspension ring 14 . In the figure, the auxiliary for...
Embodiment 2
[0041] refer to Figures 3a-3c , Figures 4a-4c The difference between this embodiment and Embodiment 1 is that the forearm drive module of this embodiment includes a cuff connector 17-2 and a rotating motor 18-2, and the cuff connector 17-2 includes a rotationally connected inner rotating shaft and an outer rotating shaft. shaft, the outer rotating shaft is fixedly connected with the second upper arm fixed sleeve 16-2, the inner rotating shaft is fixedly connected with the second forearm fixed sleeve 19-2, and the rotating motor 18-2 is fixedly installed on the outer rotating shaft of the sleeve connector 17-2 Corresponding to the position, that is, the position where the inner rotating shaft and the outer rotating shaft rotate around the center of rotation, the output shaft of the rotating motor 18-2 is fixedly connected to the inner rotating shaft of the sleeve connector 17-2.
[0042] The shoulder carousel motor 9 is fixed on the shoulder substrate at one end of the shoul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More