

A walking device of a multifunctional all-terrain biomimetic robot
A bionic robot and walking device technology, applied in the direction of power devices, electric power devices, motor vehicles, etc., can solve the problems of small contact area between the foot and the ground, cannot be fine-tuned on complex road surfaces, and affects normal walking, etc., to achieve flexible legs, The effect of smooth walking and increasing the ground area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on The embodiments of the present invention and all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
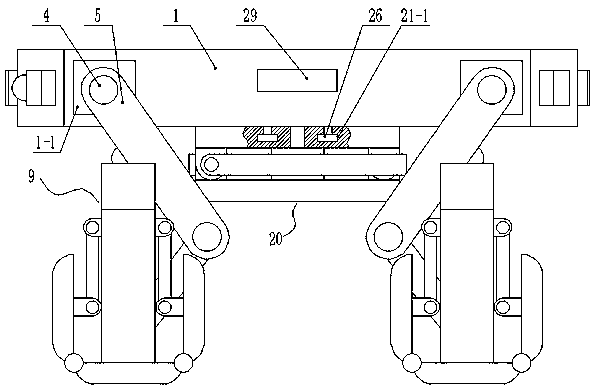
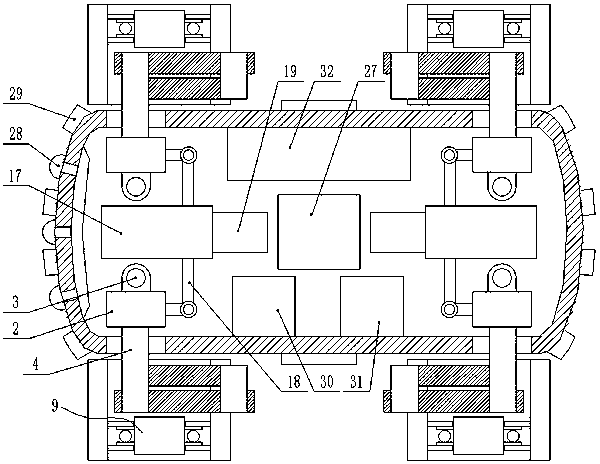
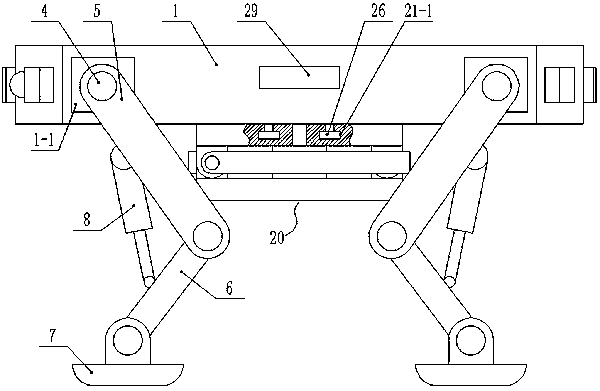
[0027] see Figure 1-7 , the present invention provides a technical solution: a walking device for a multifunctional all-terrain bionic robot, comprising a box body 1, and thigh brackets 5 are symmetrically arranged on both sides of the front and back sides of the box body 1, and the thigh brackets The end of 5 is rotatably connected with a calf support 6, the end of the shank support 6 is rotatably connected with a foot plate 7, an electric tel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More