

Parallel mechanism with three motion modes of 3R, 2R1T and 1R2T
A motion mode, R11 technology, applied in the field of robotics, can solve problems such as complex transformation process, and achieve the effect of strong dexterity, high stiffness and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
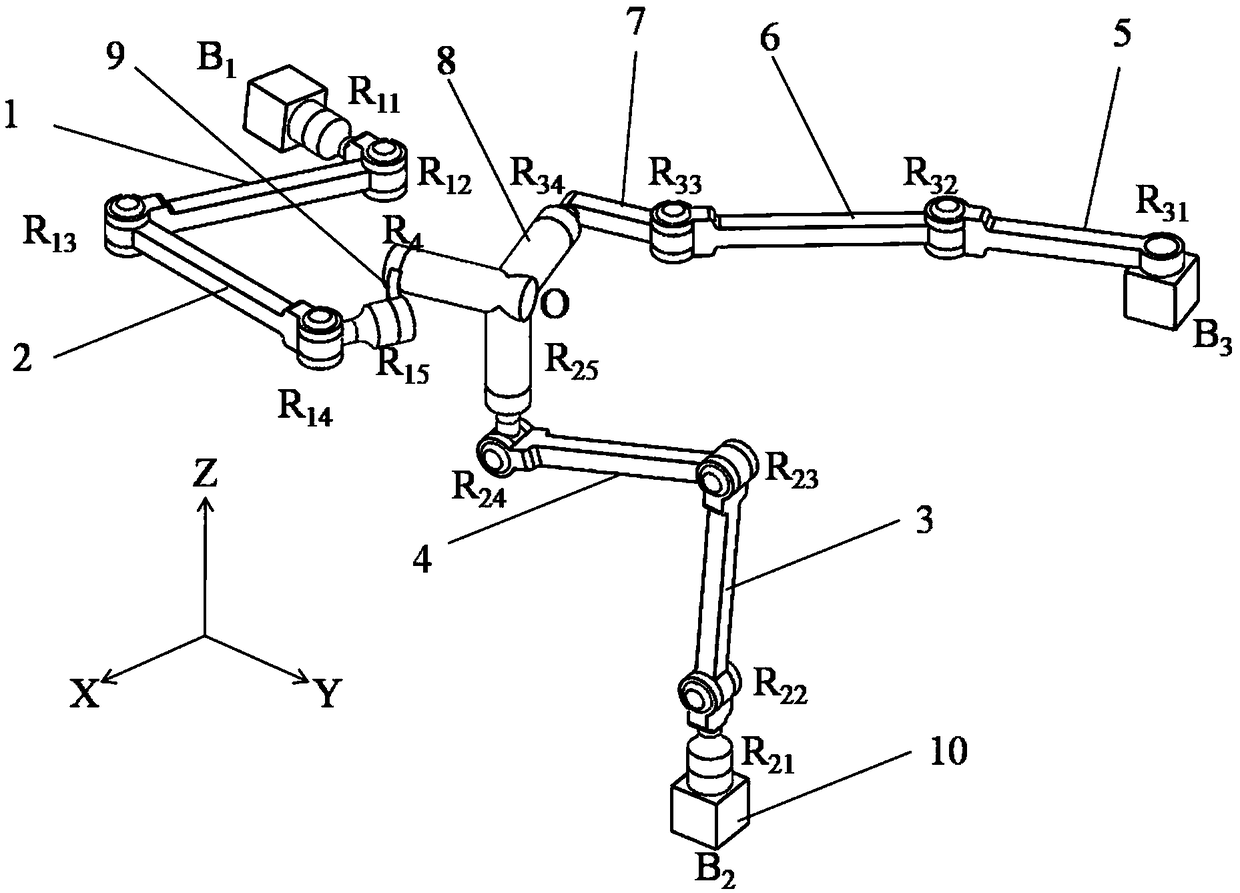
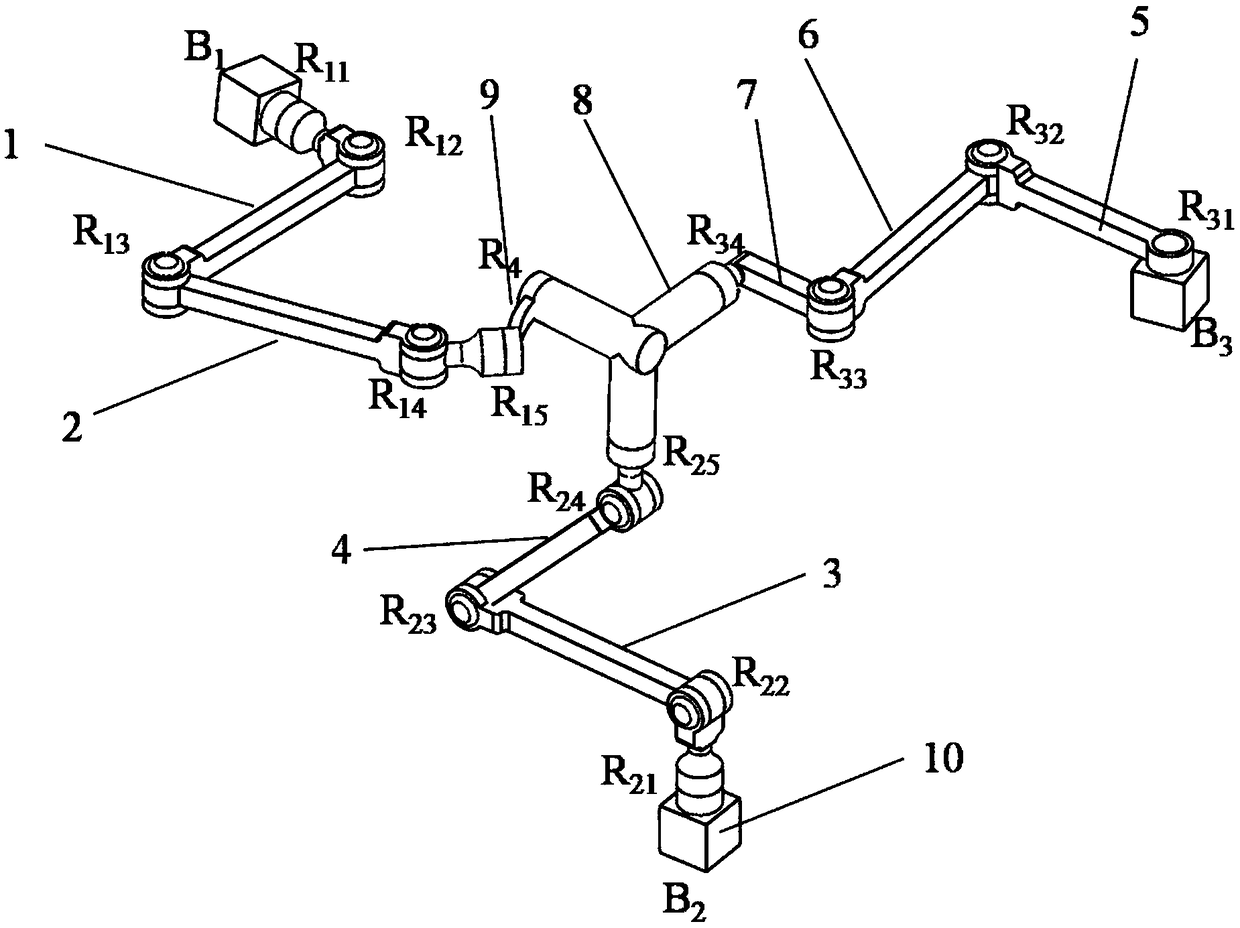
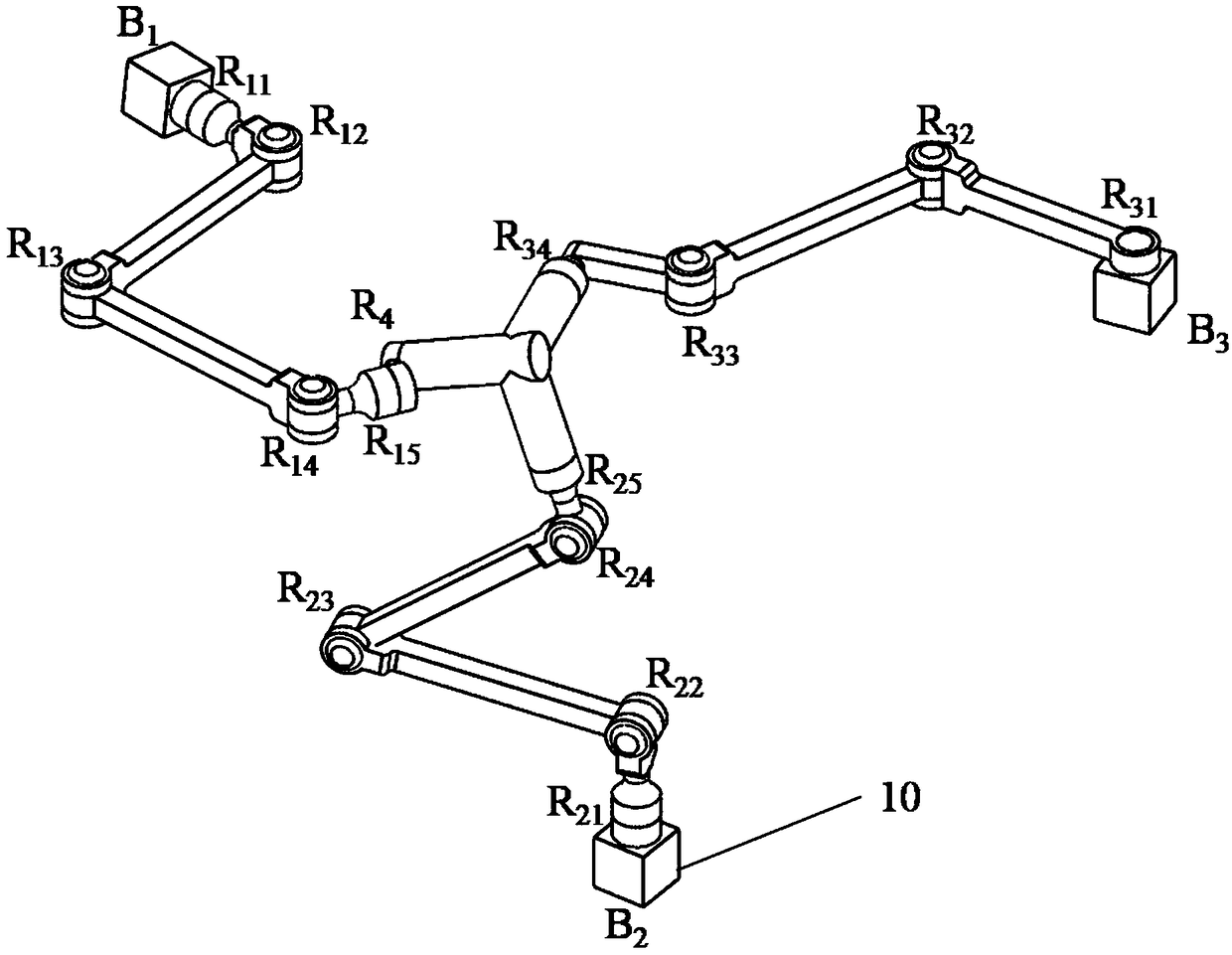
[0020] The parallel mechanism with three motion modes of 3R, 2R1T and 1R2T of the present invention includes a fixed platform 10 and a moving platform 9, and the fixed platform 10 passes through the first branch chain, the second branch chain, the third branch chain and the eighth connecting rod respectively 8 is connected to the moving platform 9, the moving platform 9 is a curved surface, the eighth connecting rod includes three straight rods perpendicular to each other, one end of the three straight rods is fixed together, and the three free ends of the three straight rods are respectively Connected with the second branch chain, the third branch chain and the rotating pair R 4 , one end of the first branch chain is connected to the fixed platform 10, the other end is connected to the moving platform 9, one end of the second branch chain is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More