Dynamic obstacle avoidance path planning method of seven-degree-of-freedom redundant mechanical arm based on fast random search tree
A random search, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to directly expand the robotic arm and the inability to directly treat it as a particle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Describe the present invention in detail below according to accompanying drawing and preferred embodiment, the object and effect of the present invention will become clearer, below in conjunction with accompanying drawing and embodiment, the present invention is described in further detail. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
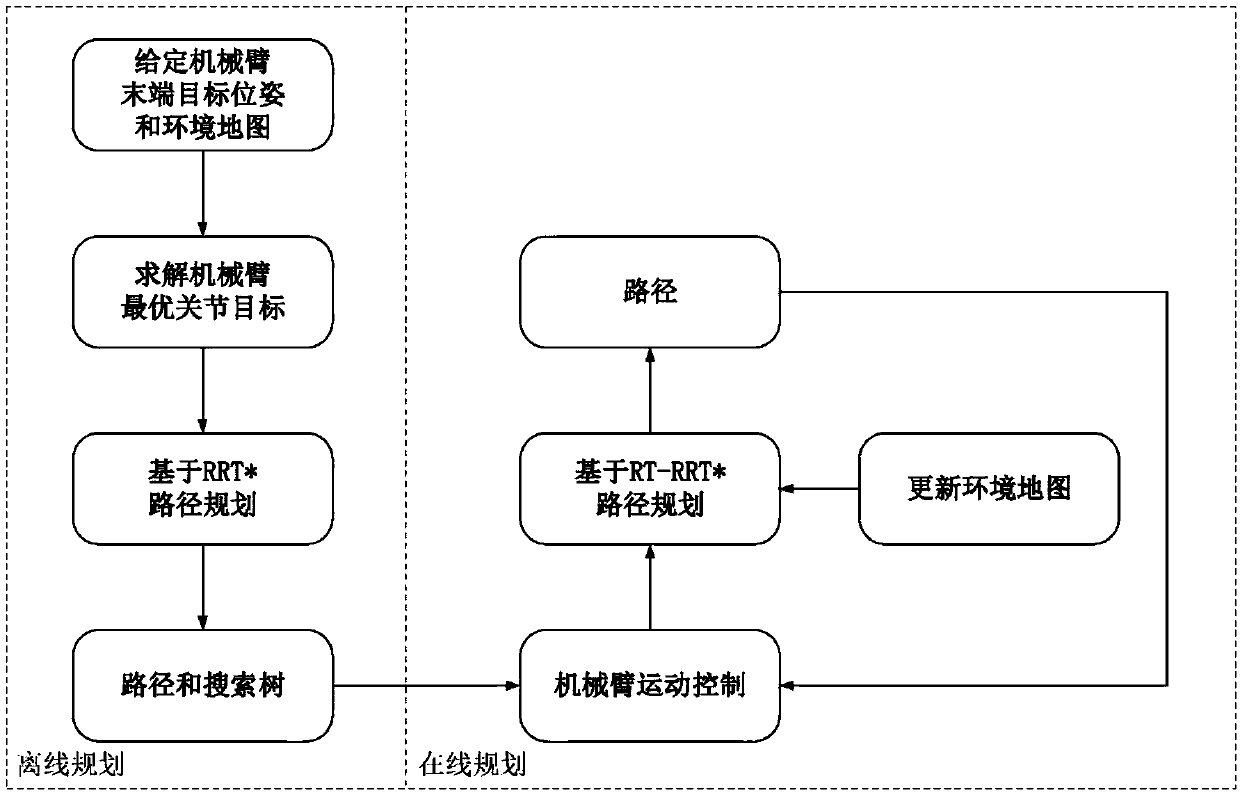
[0054] The present invention is based on an RRT*-based dynamic obstacle avoidance planning method for a seven-degree-of-freedom redundant manipulator, which is used for path planning of a multi-degree-of-freedom manipulator in a dynamic environment. The method includes two parts: offline planning and online planning. The offline planning part uses the analytical solution of the inverse kinematics of redundant manipulators to determine the optimal target state, and then uses the target as the target node to construct a search tree. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More