

A mechanical exoskeleton seat
An exoskeleton and mechanical technology, applied in the field of robotics, can solve problems such as complex adjustment process, human interference, energy consumption of electric components, etc., and achieve the effect of simple adjustment of support angle, convenient wear and operation, and flexible angle change
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the accompanying drawings.
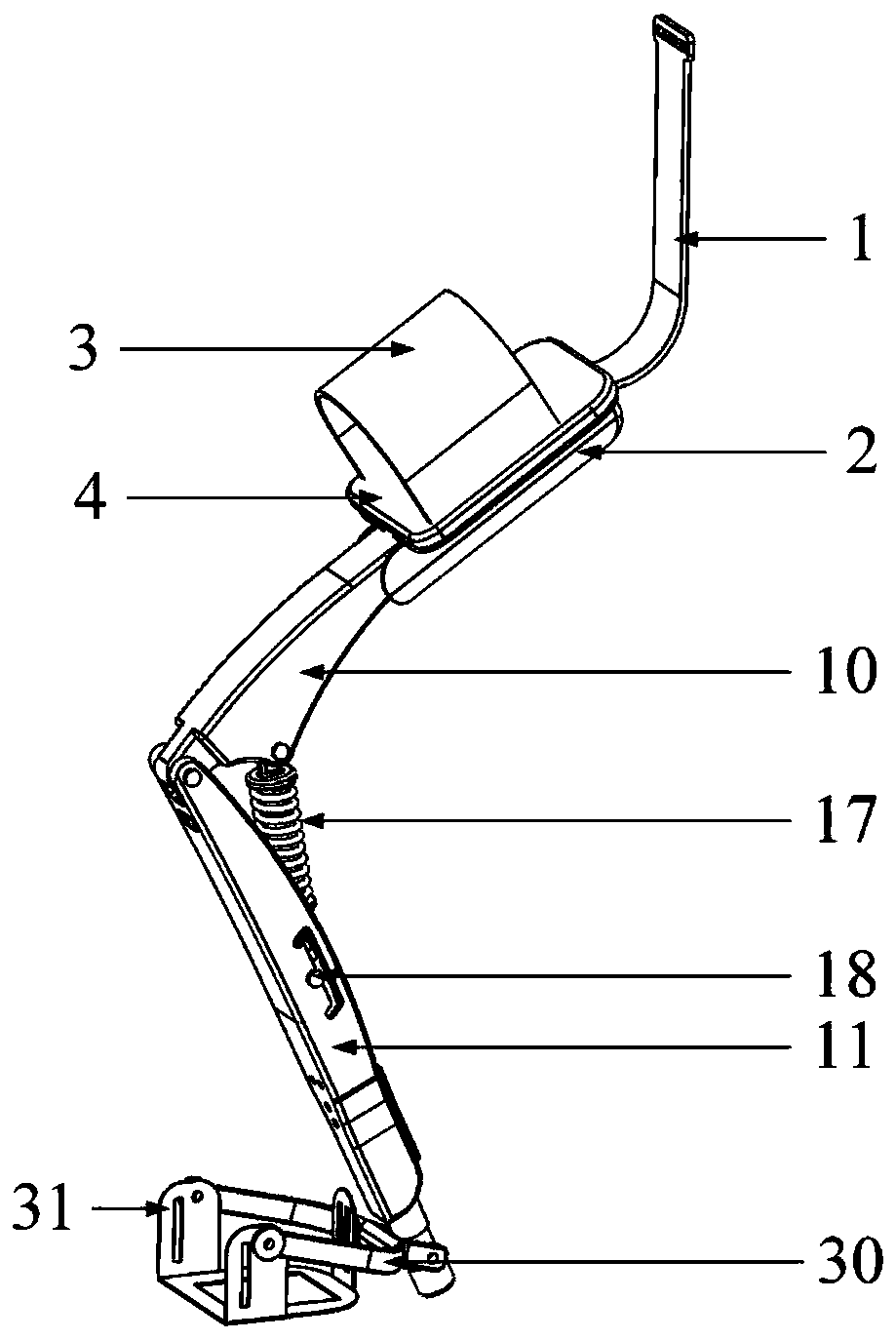
[0032] A mechanical exoskeleton seat includes a leg connection module, a buffer angle adjustable module and a foot connection module.
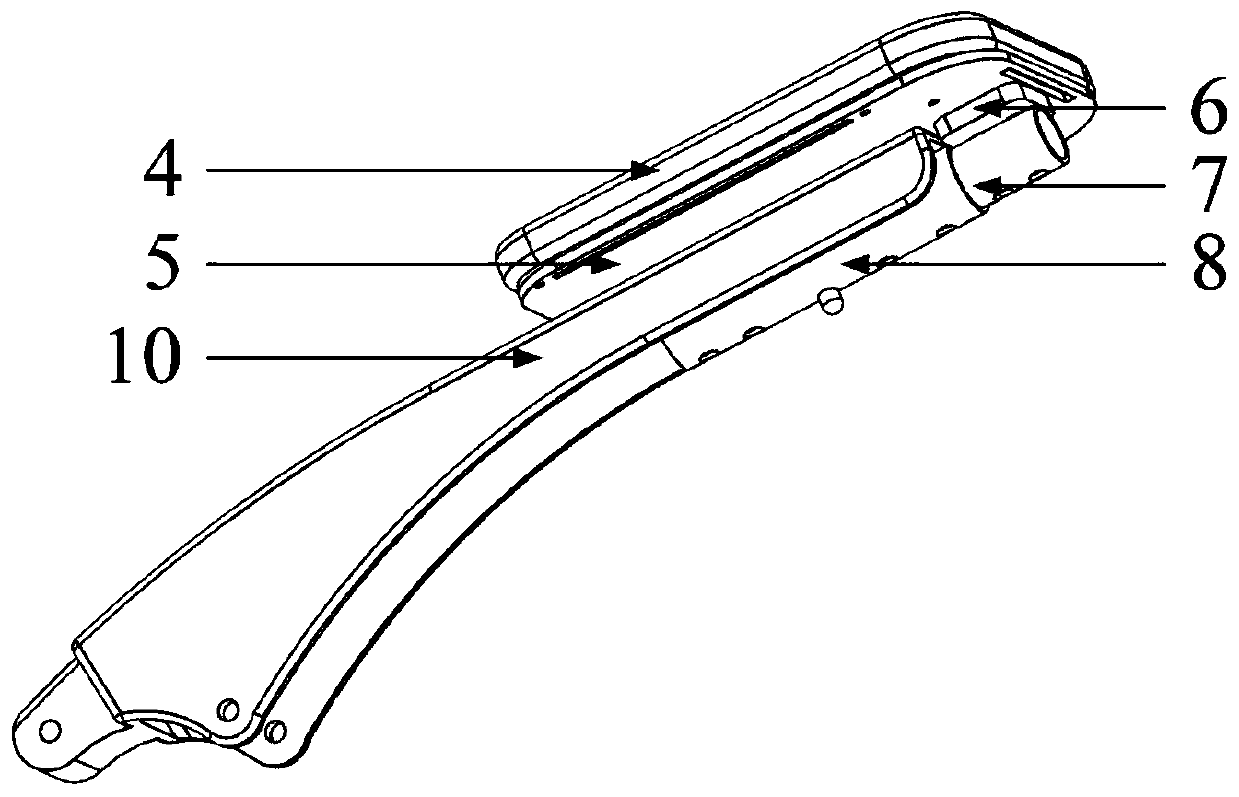
[0033] see figure 1 , the leg connection module includes a cushion board 5 that is fixedly connected with a flexible belt 1, and the flexible belt 1 is fixed with the wearer's waist belt, see figure 2 , the elongated hole of the cushion board 5 is fixed with a length-adjustable strap 3 for being tied to the wearer's thigh, and the cushion board 5 is fixedly connected with the first connecting rod 10 through the length adjustment module located thereunder; Said cushion board 5 bottom is fixedly connected with shell 2, is fixed with cushion 4 on the cushion board 5, and cushion 4 directly contacts with wearer's thigh.
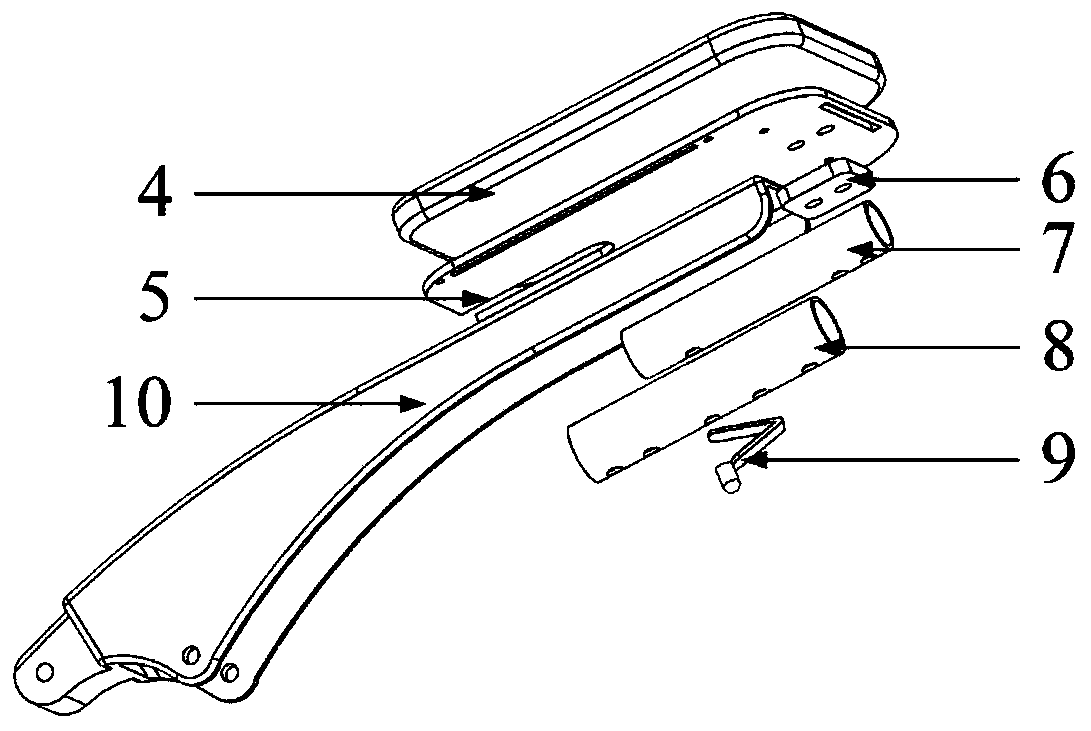
[0034] see image 3 , the length adjustment module includes a plate fixing block 6, the plate fixing bloc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More