

A method for off-line synchronization of unmanned vehicle sensor data
An unmanned vehicle and sensor technology, applied in the directions of synchronization devices, wireless communication, synchronization devices, etc., can solve the problems of confusion in sensor processing threads, inability to input sensor raw data, and large differences in computing performance, so as to meet the needs of changing sensors at any time. Types or the number of sensors added or deleted, easy to find problems and later algorithm improvements, and the effect of a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
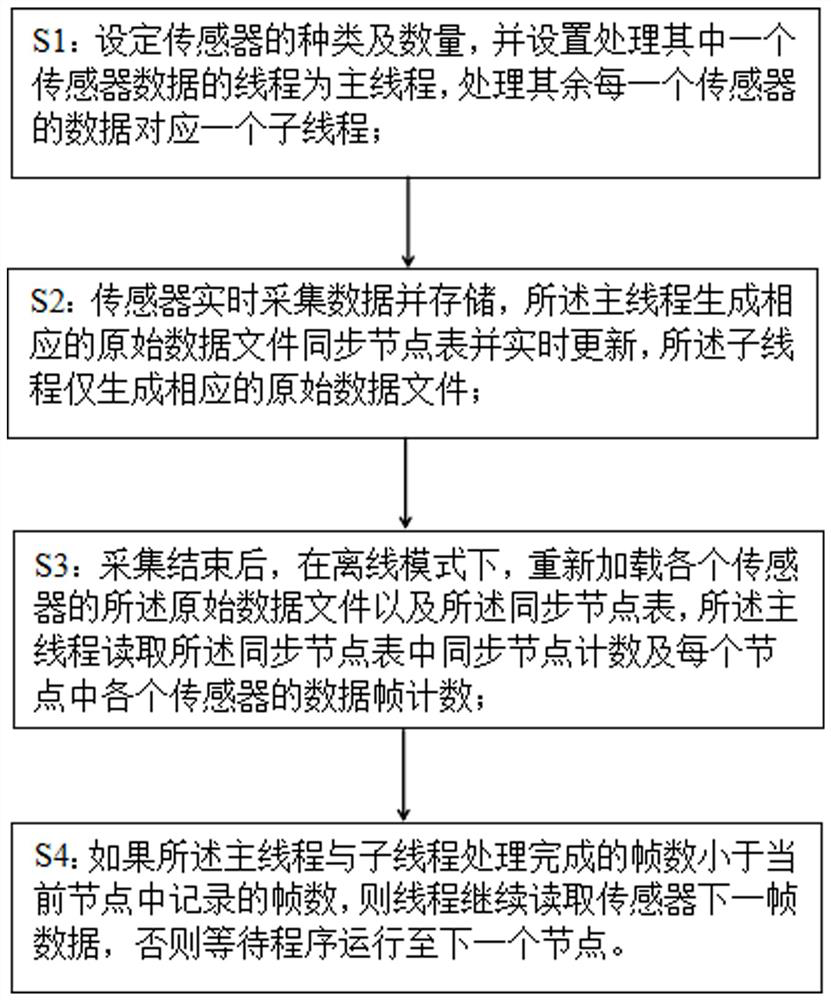
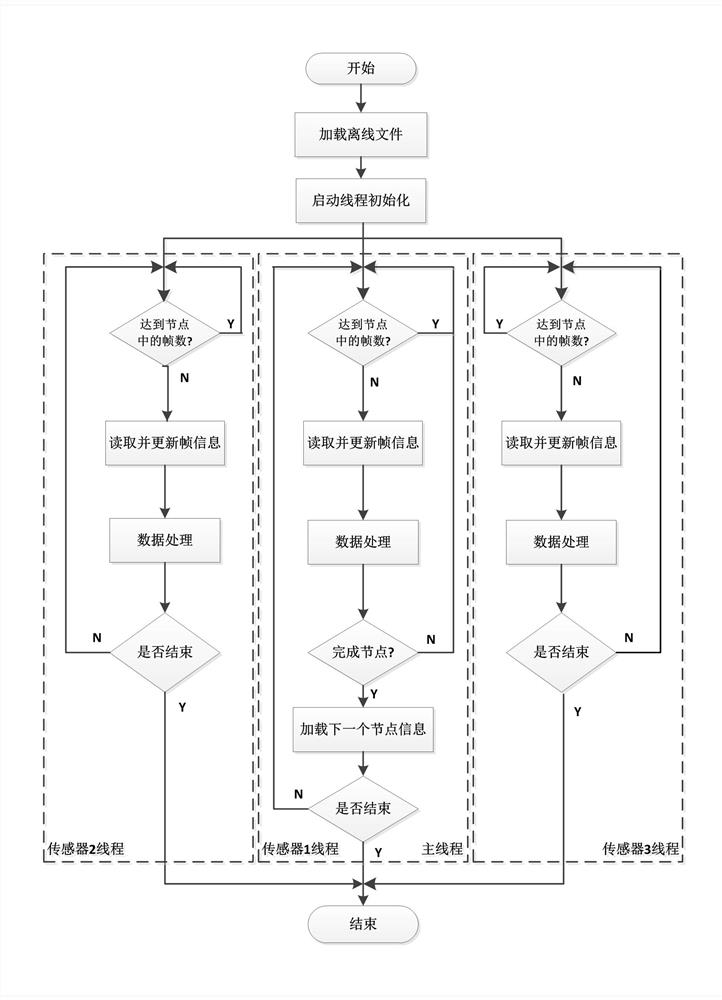
[0024] See attached Figure 1-2 As shown, Embodiment 1 of the present invention provides an off-line synchronization method for unmanned vehicle sensor data, including the following steps:
[0025] S1: Set the type and quantity of sensors, and set the thread for processing one of the sensor data as the main thread, and the data of each other sensor corresponds to a sub-thread;
[0026] S2: The sensor collects data in real time, the main thread generates and stores the synchronization node file and the corresponding main sensor raw data file in real time, and the sub-thread generates and stores the corresponding sensor raw data file in real time;
[0027] S3: After the acquisition, in offline mode, reload the original data file and the synchronization node file, and the main thread reads the synchronization node count in the synchronization node file and the data of each sensor in each node frame count;
[0028] S4: If the number of frames processed by the main thread and the...
Embodiment 2
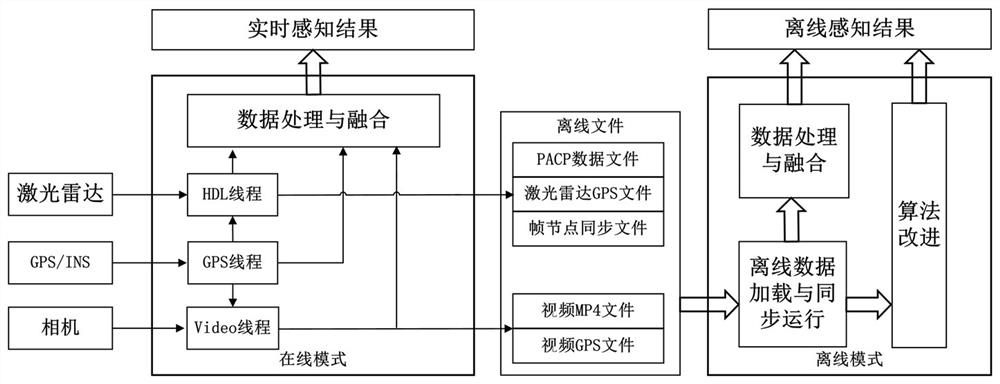
[0034] See attached image 3 As shown, Embodiment 2 of the present invention is an application example of an off-line synchronization method for unmanned vehicle sensor data. In this embodiment, the on-board sensors processed by the system include:
[0035] (1) Laser radar, the laser radar can be erected in front of the roof to detect various obstacles in the driving environment, and the model HDL-64E high-precision laser radar produced by Velodyne can be selected;
[0036] (2) Camera. The camera can be installed on the vehicle axis in front of the roof for target recognition or passable area detection. You can choose the model DFK 23G274 industrial camera produced by Yingmeijing Company, with a resolution of 640×480;
[0037] (3) High-precision combined positioning system. The signal receiving antenna of the combined positioning system is located behind the roof of the vehicle to obtain the GPS and attitude information of the vehicle at a certain moment. You can choose the SP...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More