

A collaboratively driven three-fingered robotic dexterous hand
A robot and dexterous hand technology, applied in the field of robotics, can solve the problems of difficulty in adapting to work requirements, large volume and weight of three-fingered robot hands, and high cost, so as to improve finger grasping force and grasping stability, retain dexterity, The effect of reducing peak stress
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The embodiments of the present invention will be further described below with reference to the accompanying drawings and examples. It should be noted that the embodiments are not limited to the scope of the invention.
[0028] The way of use is as follows:
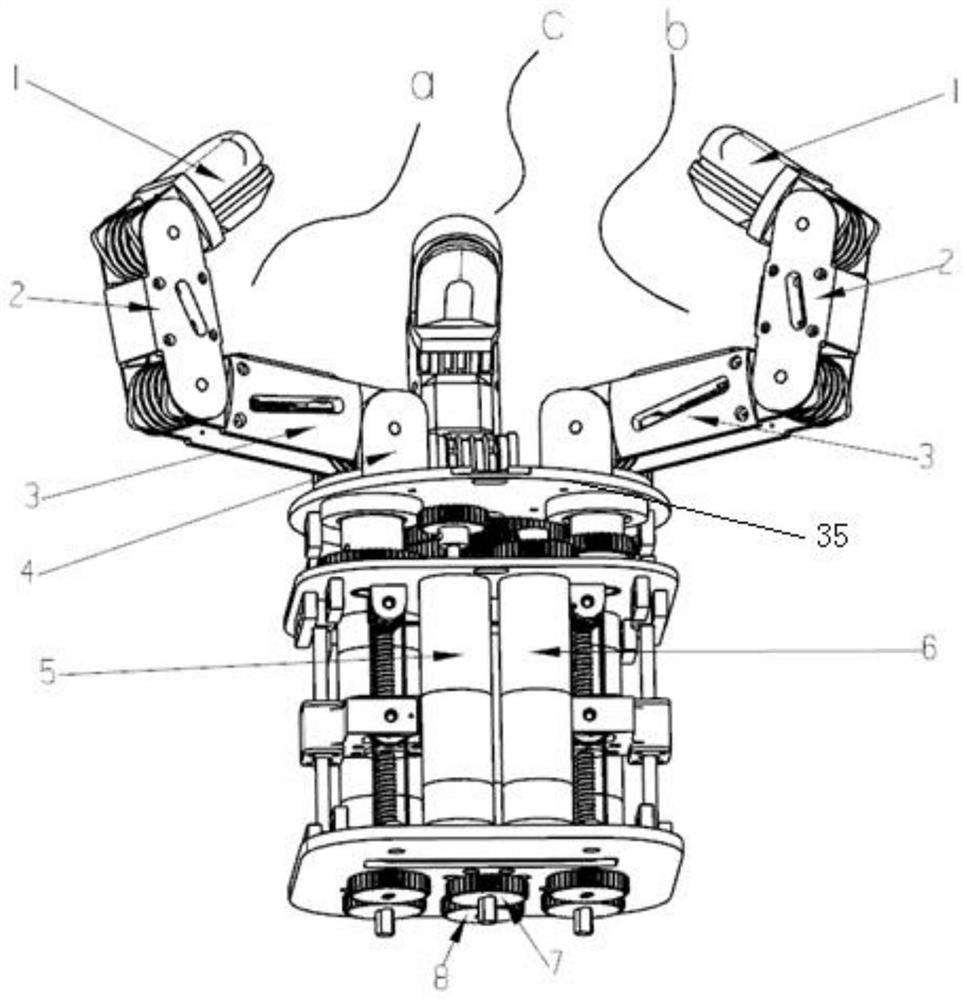
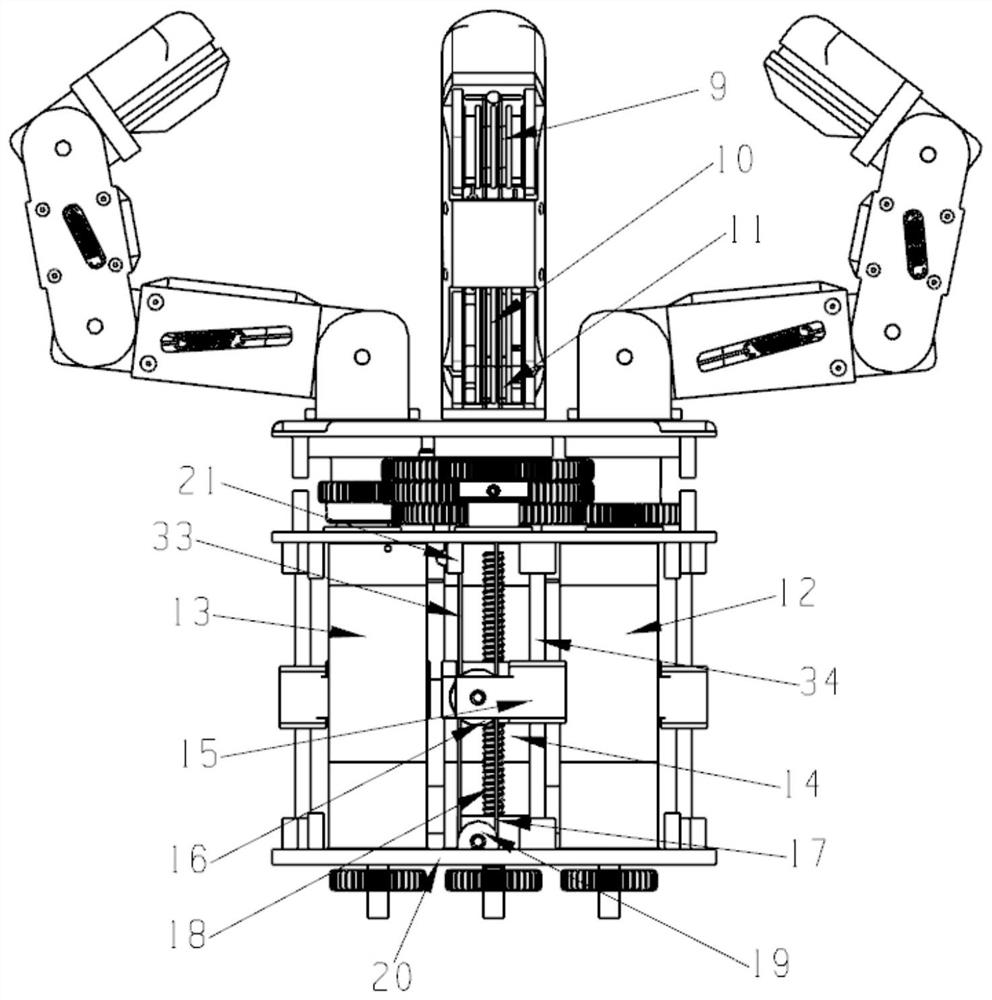
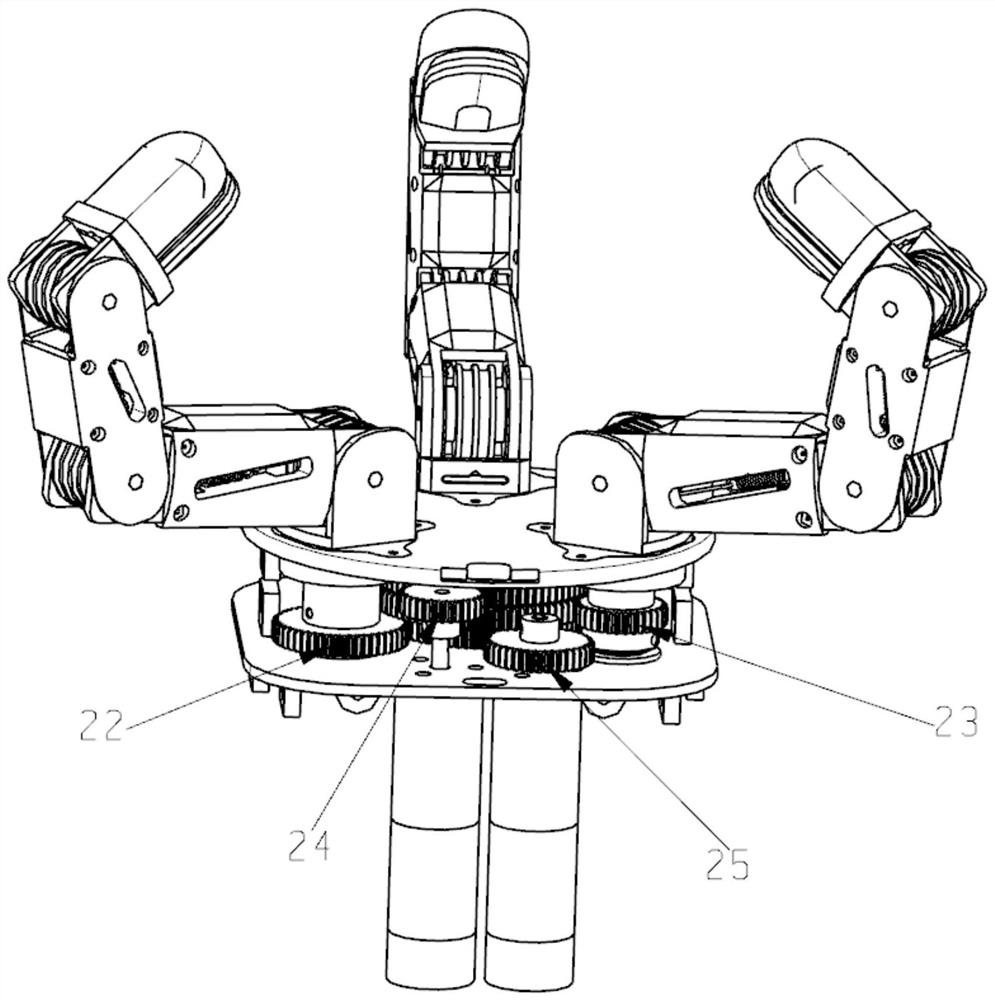
[0029] Such as figure 2 , 6 As shown in FIG. 7, when the first motor 14 is rotated, the second gear 7 is rotated by the first gear 8, and the first gear 8 drives the ball screw 18 to rotate, the slider 15 coincides with the ball screw 18 and the optical axis 34. The downward line movement, the first wire rope 17 is tensioned, the second wire rope 33 is relaxed, the finger is curved under the action of the first wire rope 17, and the displacement amount of the first wire rope 17 and the second wire rope 33 make up each other, the rope is not Produce excess strokes.
[0030] Such as figure 2 Design, the first motor 14 is rotated in reverse, the second gear 7 is rotated by the first gear 8, and the first gear 8 is rotated,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More