UAV flight control method and device, equipment and storage medium
A flight control and drone technology, applied in the field of drones, can solve problems such as unpredictable flight routes and potential safety hazards of drones, and achieve the effect of avoiding entering the no-fly area by mistake and ensuring flight safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0023] figure 1 It is a flow chart of a UAV flight control method provided in Embodiment 1 of the present invention, which can be applied to the automatic return control of UAVs near the no-fly area. The flight control device can be implemented by means of software and / or hardware, and can generally be integrated into the flight control computer of the drone.
[0024] Wherein, the execution timing of the flight control method of the UAV can be during the entire flight process of the UAV, or when the flight area of the UAV meets the set conditions, for example, when the UAV flies to After the geographic location is set (there is a no-fly area near the geographic location), the flight control method of the drone is executed, which is not specifically limited in this embodiment.
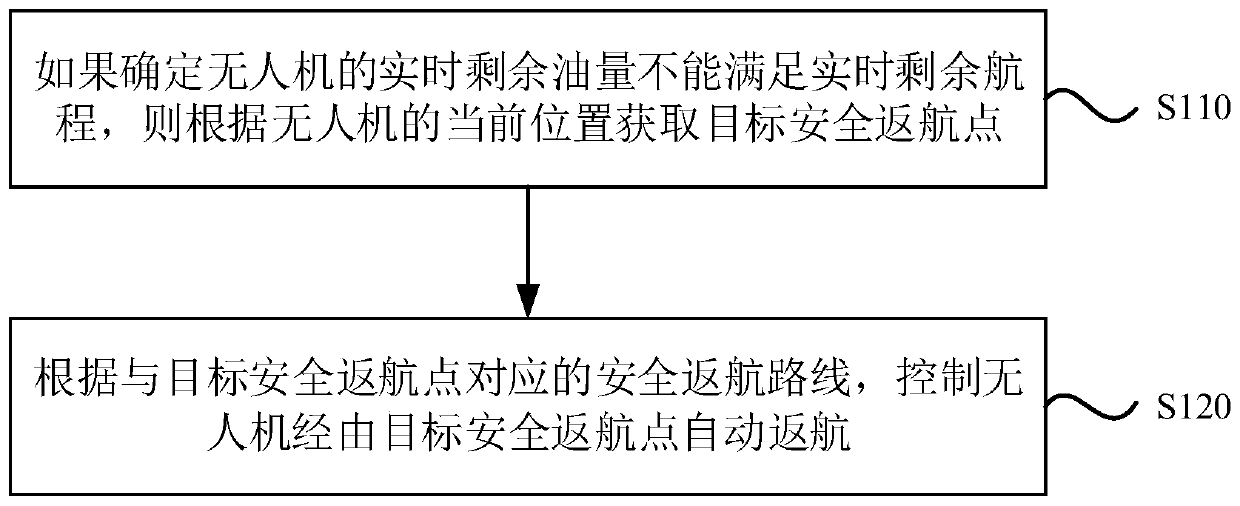
[0025] Such as figure 1 As shown, the method of this embodiment specifically includes:
[0026] S110. If it is determined that the real-time remaining fuel volume of the drone cannot meet the real-...
Embodiment 2
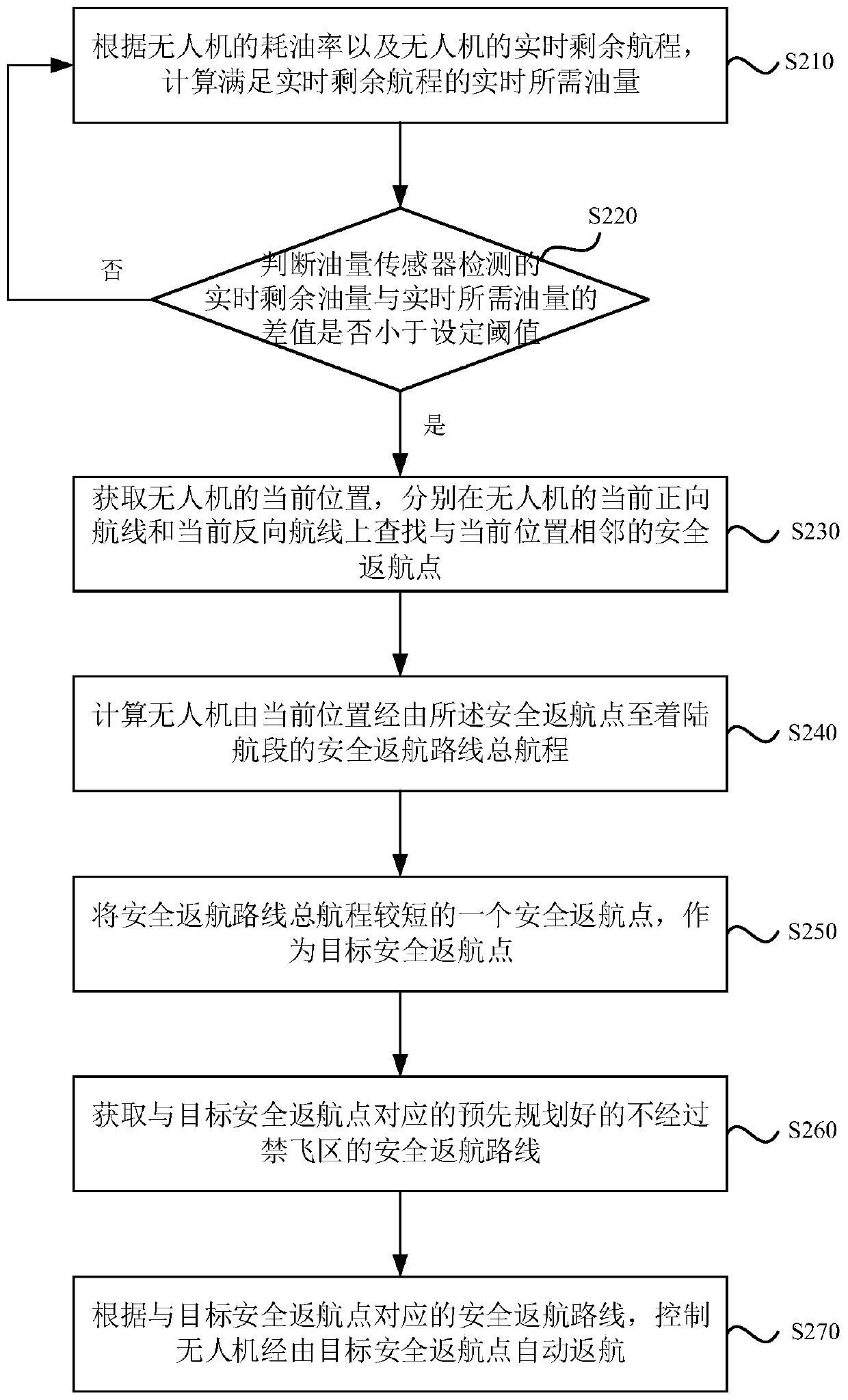
[0046] figure 2 It is a flowchart of a flight control method for a UAV provided in Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiment, wherein, the current flight route of the UAV will be searched for and the The safe return point adjacent to the current position is used as the target safe return point, specifically:
[0047] Find the safe return point adjacent to the current position on the current forward route and the current reverse route of the drone respectively; use a safe return point with a shorter total voyage of the safe return route as the target safe return point.
[0048] Further, before using a safe return point with a shorter safe return route as the target safe return point, it also includes: calculating the total voyage of the safe return route from the current position of the drone to the landing segment via the safe return point.
[0049] Such as figure 2 As shown, the method of this embodim...
Embodiment 3
[0075] Figure 4 It is a schematic structural diagram of a flight control device for a drone provided in Embodiment 3 of the present invention, which is applicable to the automatic return control of the drone near the no-fly area, and the device can be realized by software and / or hardware. And generally can be integrated in the flight control computer of the UAV. Such as Figure 4 As shown, the flight control device of the UAV specifically includes: a safe return point acquisition module 410 and an automatic return control module 420 . in,
[0076] The safe return point acquisition module 410 is used to obtain the target safe return point according to the current position of the drone if it is determined that the real-time remaining fuel quantity of the drone cannot meet the real-time remaining range;
[0077]The automatic return control module 420 is configured to control the UAV to automatically return via the target safe return point according to the safe return route co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More