

A method for tumor pose estimation in a closed phantom
A pose estimation and closed body technology, applied in the field of breath tracking system, can solve the problems of high cost and complicated operation, and achieve the effect of simple structure, convenient operation and accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
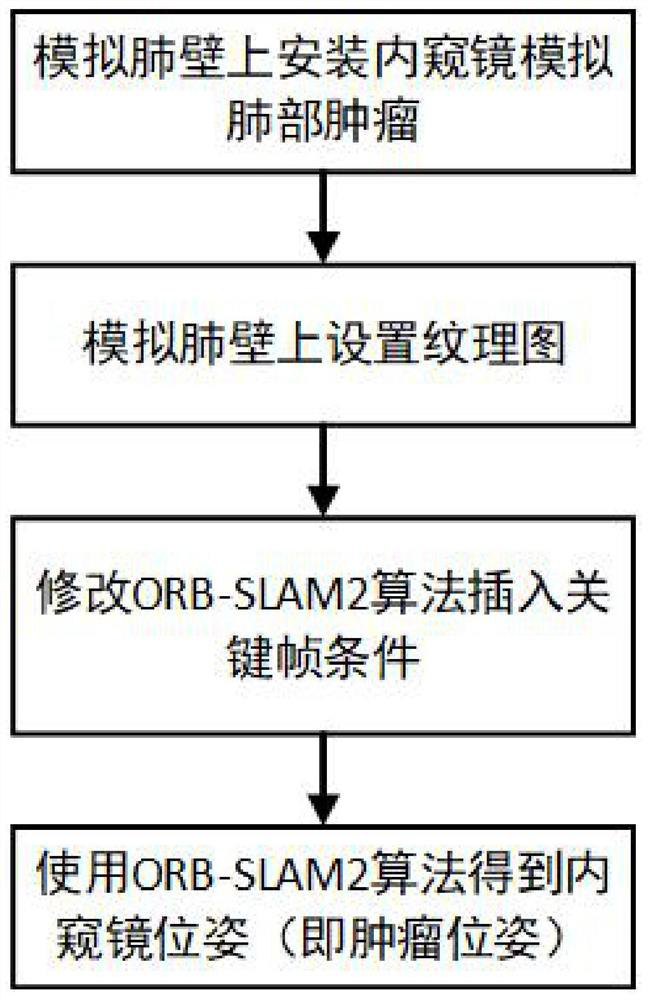
[0038] refer to figure 1 As shown, the present invention discloses a method for estimating the pose of a tumor in a closed phantom, comprising the following steps:
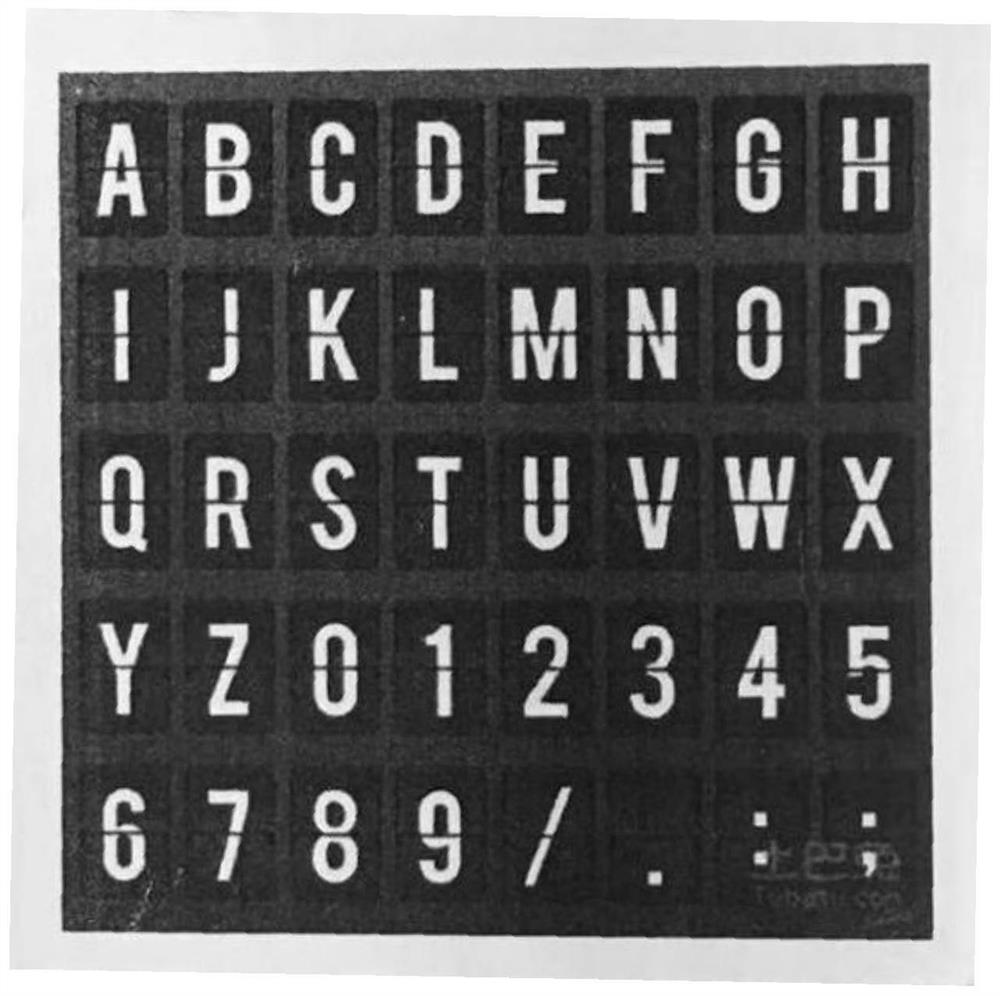
[0039] Step 1: Fix and set the visual texture map on the inner wall of the simulated lung. Since the simulated lung will deform when simulating breathing movement, in order to avoid the visual texture map from moving, the visual texture map needs to be fixed. The specific operation is to cut a hole in the simulated lung first, and paste the hard board of the texture map inside the lung. A hard board of the same size is pasted on the corresponding position outside the lung for reinforcement. image 3 is a visual tex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More