

Adaptive control method for robotic arm system based on time-varying asymmetric obstacle Lyapunov function
A technology of adaptive control and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of poor motion performance of the system, unstable operation of the system, and difficulty in ensuring the steady-state performance and Transient performance and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0128]The present invention will be further described below in conjunction with the accompanying drawings.
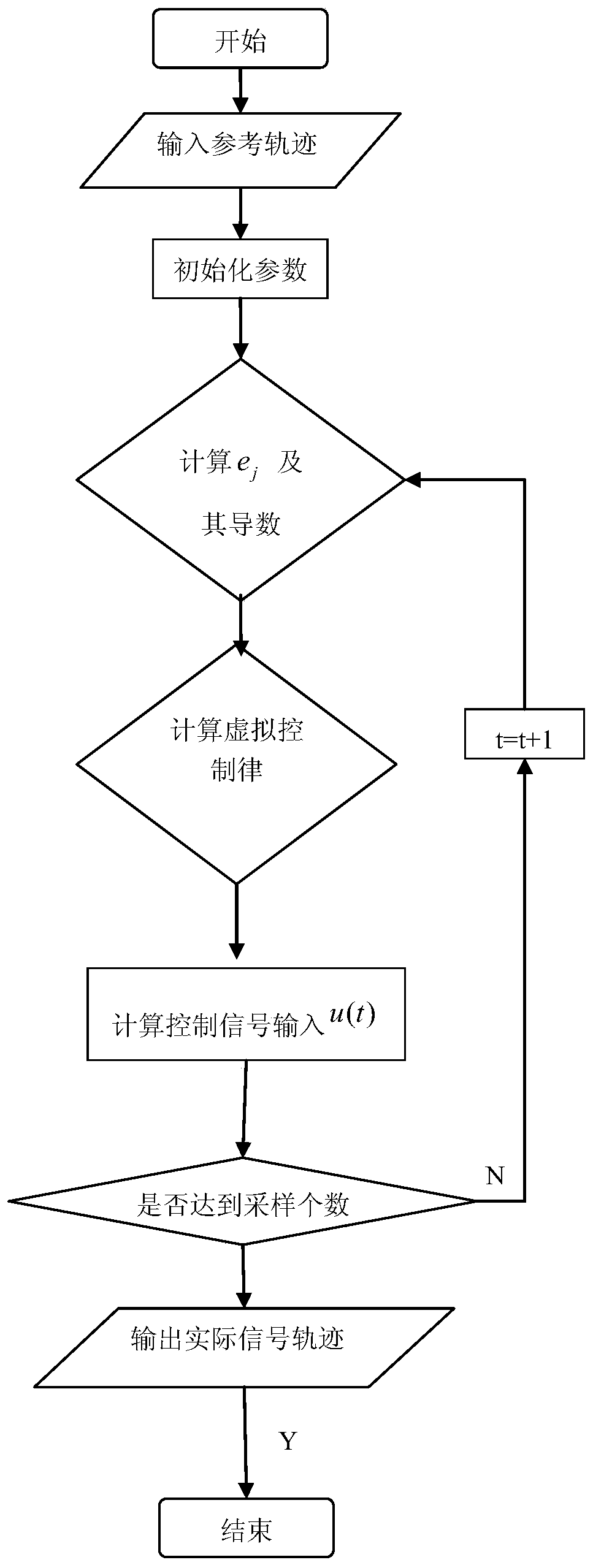
[0129] refer to Figure 1-Figure 7 , an adaptive control method for a manipulator system based on a time-varying asymmetric obstacle Lyapunov function, including the following steps:
[0130] Step 1, establish the servo system model of the manipulator;
[0131] 1.1, the servo system model of the manipulator is expressed in the following form
[0132]
[0133] in, and is the uncertain item of the system model, d 1 , d 2 is the external interference signal, q is the angular position of the mechanical arm joint, the angular position of the θ motor, K is the joint elastic coefficient, I, J are the inertial coefficients of the mechanical arm and the motor, M, g, L are the mass and gravity of the mechanical arm Acceleration and the length of the manipulator, τ is the control torque of the manipulator;
[0134] 1.2, Design a time-varying asymmetric barrier Lyapunov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More