

High-precision nonlinear path-following control method for underactuated marine vehicles
A non-linear path and tracking control technology, which is applied in the control of finding targets, three-dimensional position/channel control, adaptive control, etc., can solve the problems of non-integrable acceleration, inability to guarantee the accuracy of path tracking control, and unsatisfactory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0041] The invention provides an observer-based high-precision nonlinear path tracking control method to realize high-precision nonlinear path tracking of an underactuated ocean vehicle under the condition of multiple uncertainties.
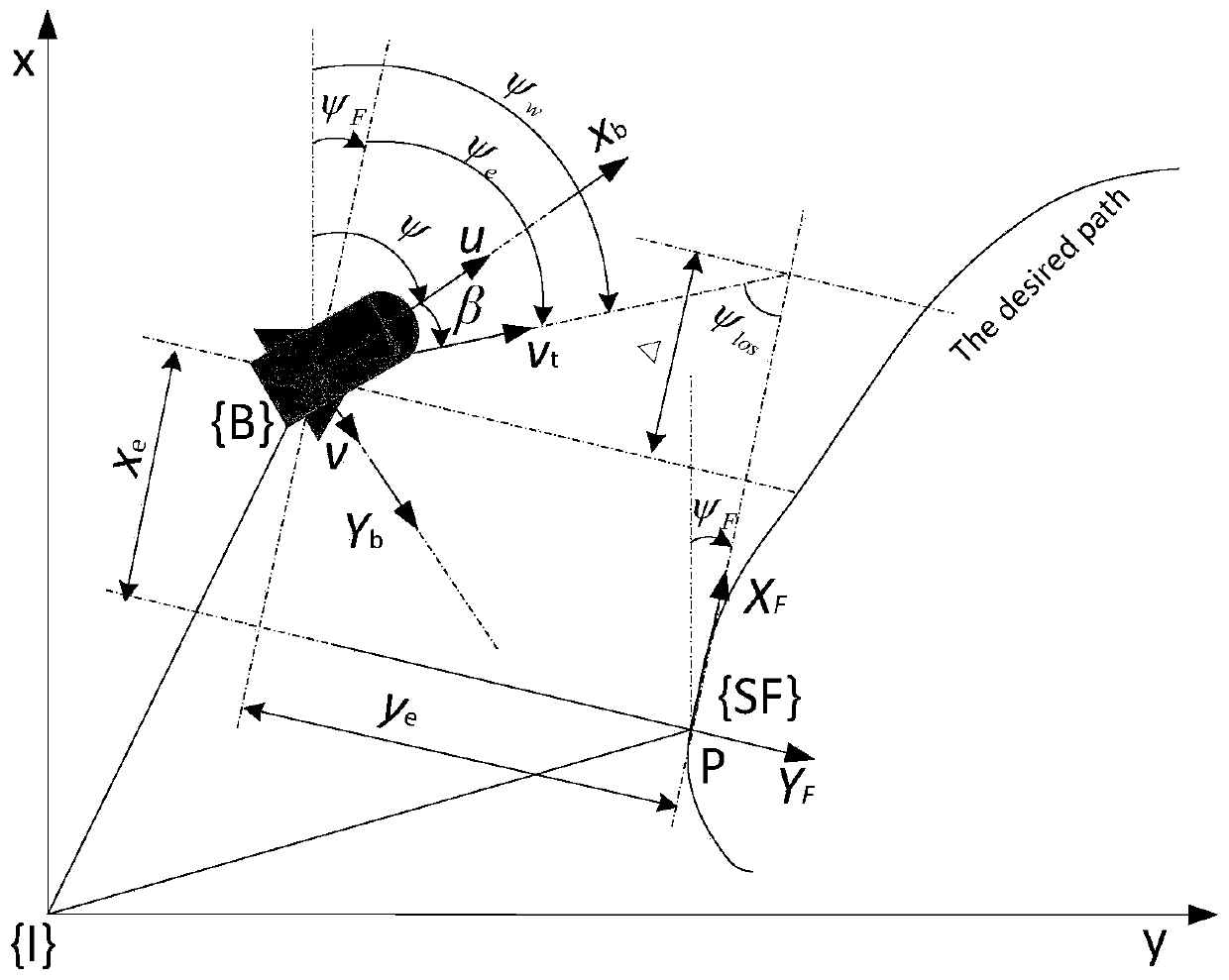
[0042] like figure 1 As shown in , the definition of the ocean vehicle coordinate system and the schematic diagram of the path tracking in the horizontal plane. {I}, {B} and {SF} are inertial coordinate system, vehicle coordinate system and Serret-Frenet curve coordinate system respectively. The coordinate systems of {I} and {B} follow the standard specification, and the coordinate origin of {SF} is any point on the desired path, and its horizontal axis X F Along the path tangent direction, vertical axis Y F is the normal direction.
[0043] In the following, the path tracking control system in the horizon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More