

Hierarchical anti-collision control method for fixed-wing unmanned aerial vehicle cluster
A control method, UAV technology, applied in control/regulation systems, non-electric variable control, three-dimensional position/channel control, etc., can solve the problem of poor avoidance effect, inability to solve and avoid obstacles at the same time, and individual collision avoidance in the cluster Problems, problems such as not covering collisions and dangerous scenarios well
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The following further describes the present invention with reference to the accompanying drawings of the specification and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
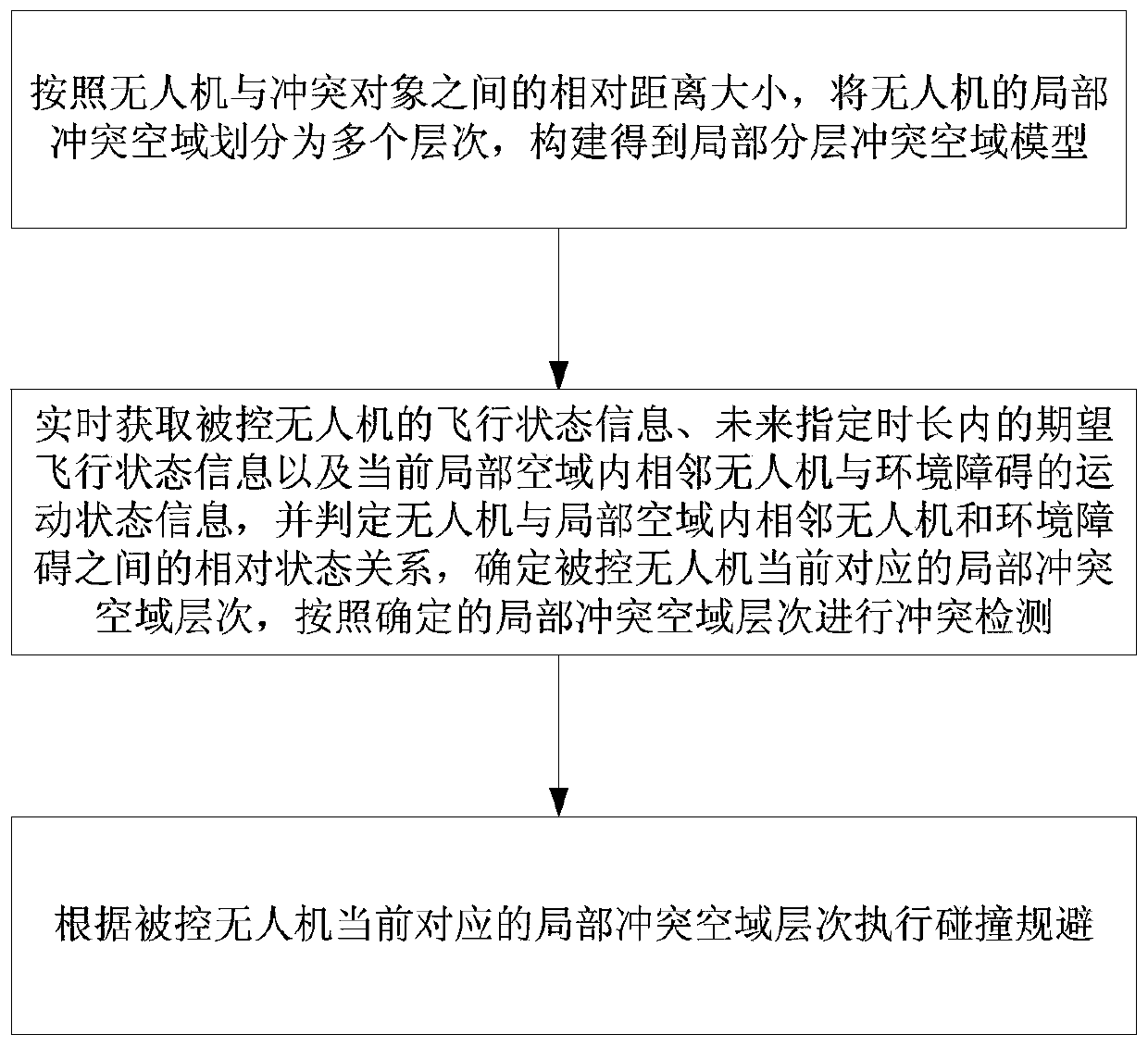
[0072] Such as figure 1 As shown, the steps of the hierarchical collision avoidance control method of the fixed-wing UAV cluster of this embodiment include:
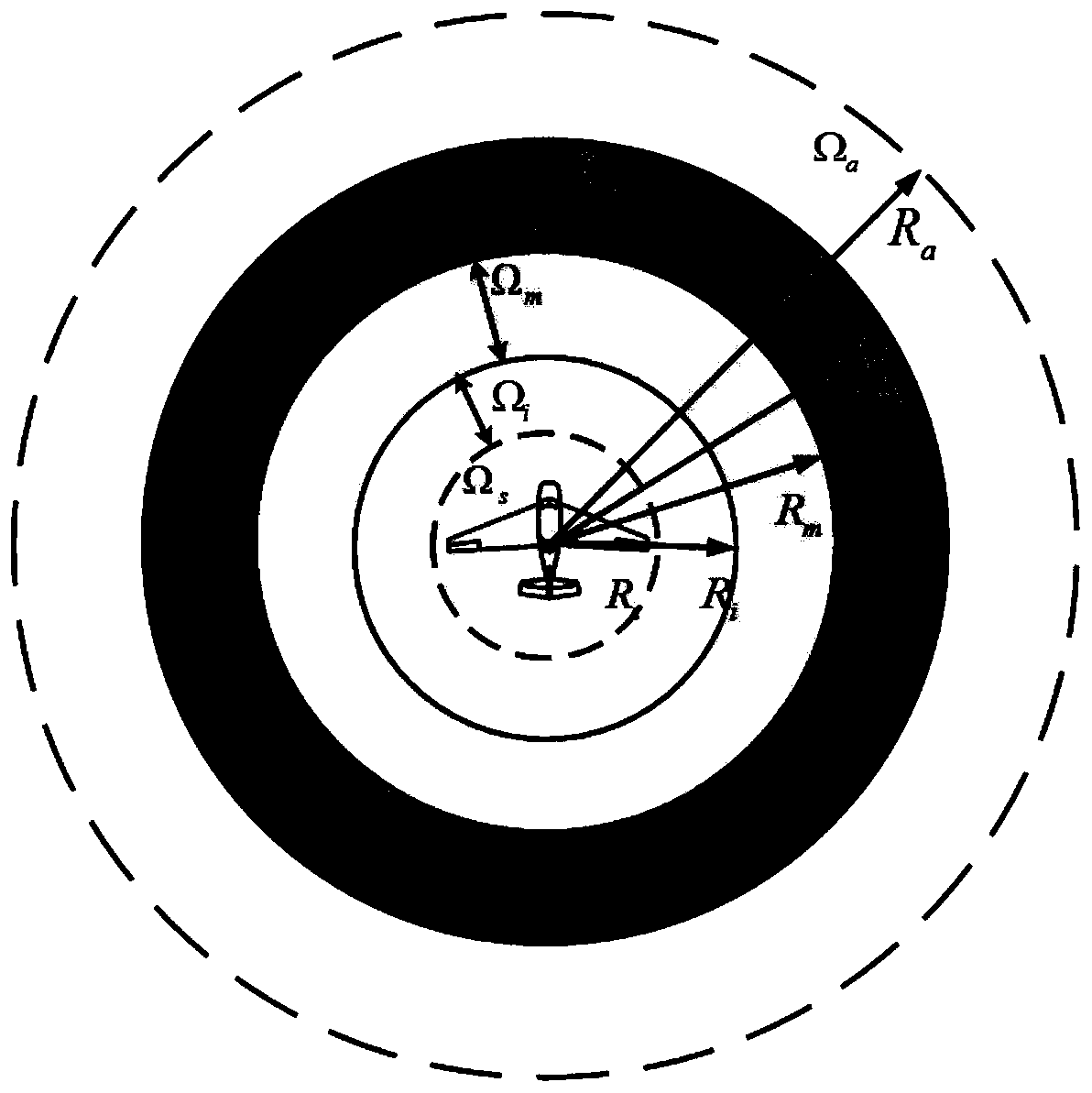
[0073] S1. Hierarchical model construction: According to the relative distance between the drone and the conflicting object, the local conflict airspace of the drone is divided into multiple levels, and the local hierarchical conflict airspace model is constructed;
[0074] S2. Hierarchical conflict detection: Obtain real-time flight status information of the controlled drone, expected flight status information within a specified time in the future, and current motion status information of neighboring drones and environmental obstacles in the local airspace, and determine no one The relative s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More