

Unmanned aerial vehicle cluster control method based on machine vision
A machine vision, cluster control technology, applied in non-electric variable control, control/regulation systems, three-dimensional position/channel control, etc., can solve the inconvenience of accurate positioning of the landing position of the drone cluster, and can not solve the problem of the individual in the cluster at the same time. Anti-collision issues, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
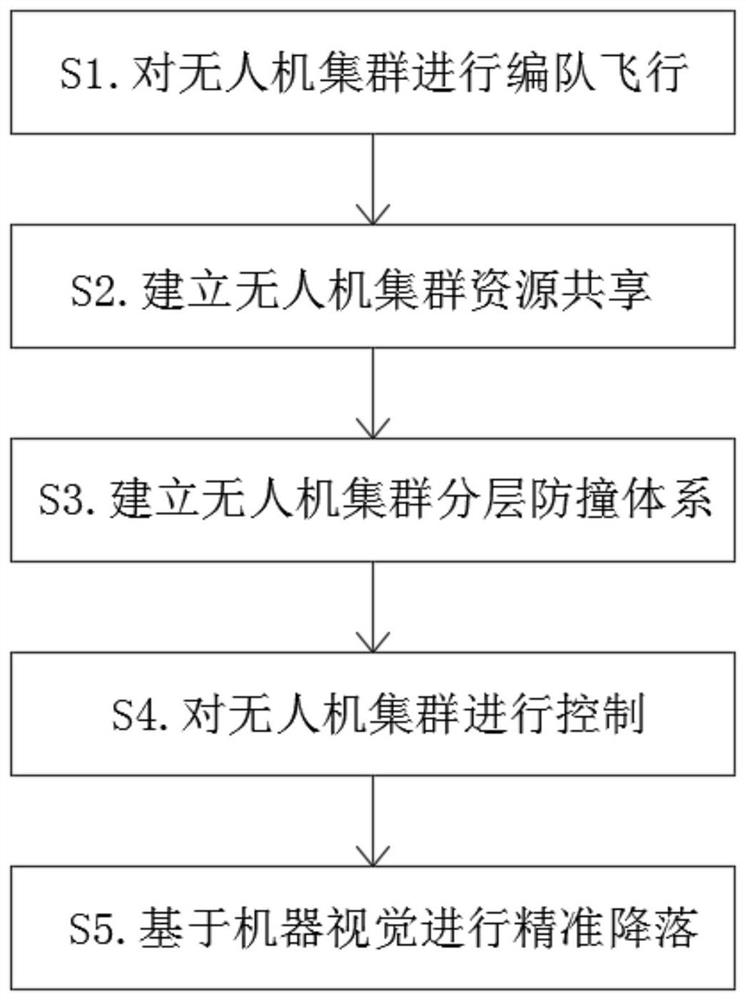
[0026] see figure 1 , the present invention provides the unmanned aerial vehicle swarm control method based on machine vision, comprises the following steps:
[0027] S1. Fly in formation for the drone cluster: S11. In the drone cluster, number the drones according to the motion model of the drone; S12. Use the formation controller to control the formation of the drone cluster; S13. Based on the behavioral formation control strategy, select the formation flig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More