

A robot path search method, system, device and storage medium
A path search and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of cumbersome teaching steps and reduce the applicability of search methods, so as to simplify the steps of teaching and searching, improve flexibility and Practicality, the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
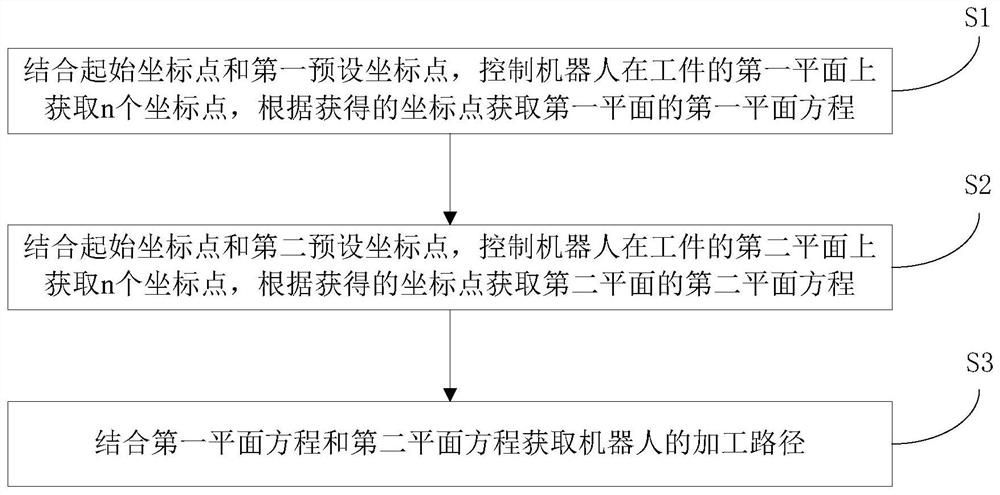
[0188] The following uses a welding robot as an example to explain the above-mentioned plane search method in detail:
[0189] This plane search method includes a teaching step, a search step and a calculation step; refer to Figure 5 , where the teaching part is operated by workers before the robot performs batch operations. The process of the teaching part is as follows:
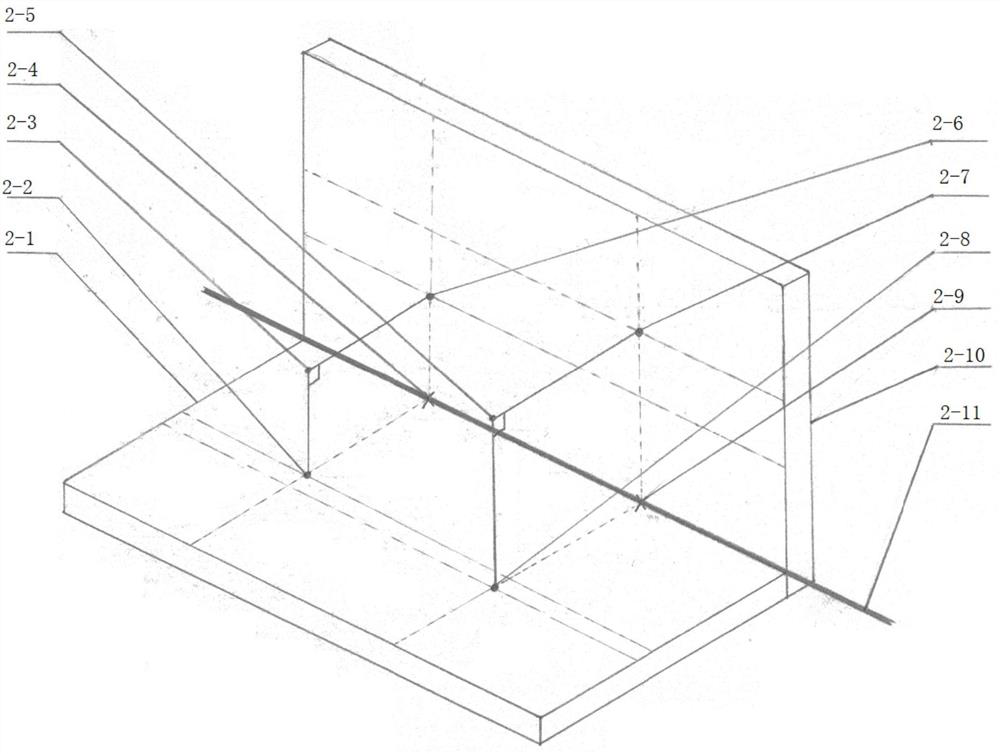
[0190] Step 1: Control the teaching robot to move to the starting point where it can move in a straight line without being hindered and touch the two surfaces. Record this point as point 1 (x1, y1, z1);
[0191] Step 2: Move the teaching robot to the first plane and touch it, and record this touch point as point 2 (x2, y2, z2);
[0192] Step 3: Set the radius r of the circle centered at point 2 1 , the circle is perpendicular to the straight line connecting point 1 and point 2, so that moving from point 1 to any point on the circle can touch the first plane;
[0193] Step 4: Move the teaching robot to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More