Numerical control discrete speed curve planning method
A speed curve and curve planning technology, applied in electric controllers, controllers with specific characteristics, etc., can solve problems such as increasing the amount of algorithm calculation, segmented multi-structure, and complexity, and achieve smooth speed curve planning and simple calculation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
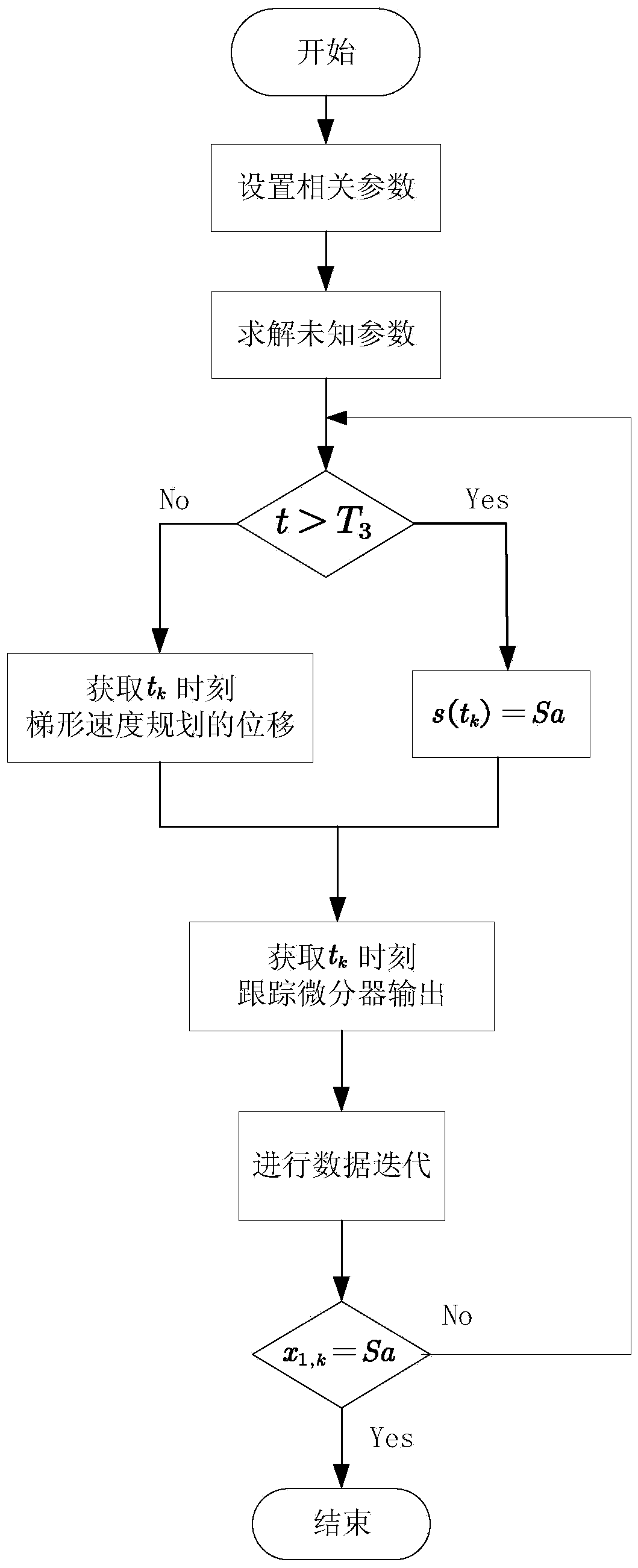
[0048] In this embodiment, the speed curve planning system established by the numerically controlled discrete speed curve planning method is applied to sports equipment, and the implementation process is as follows:
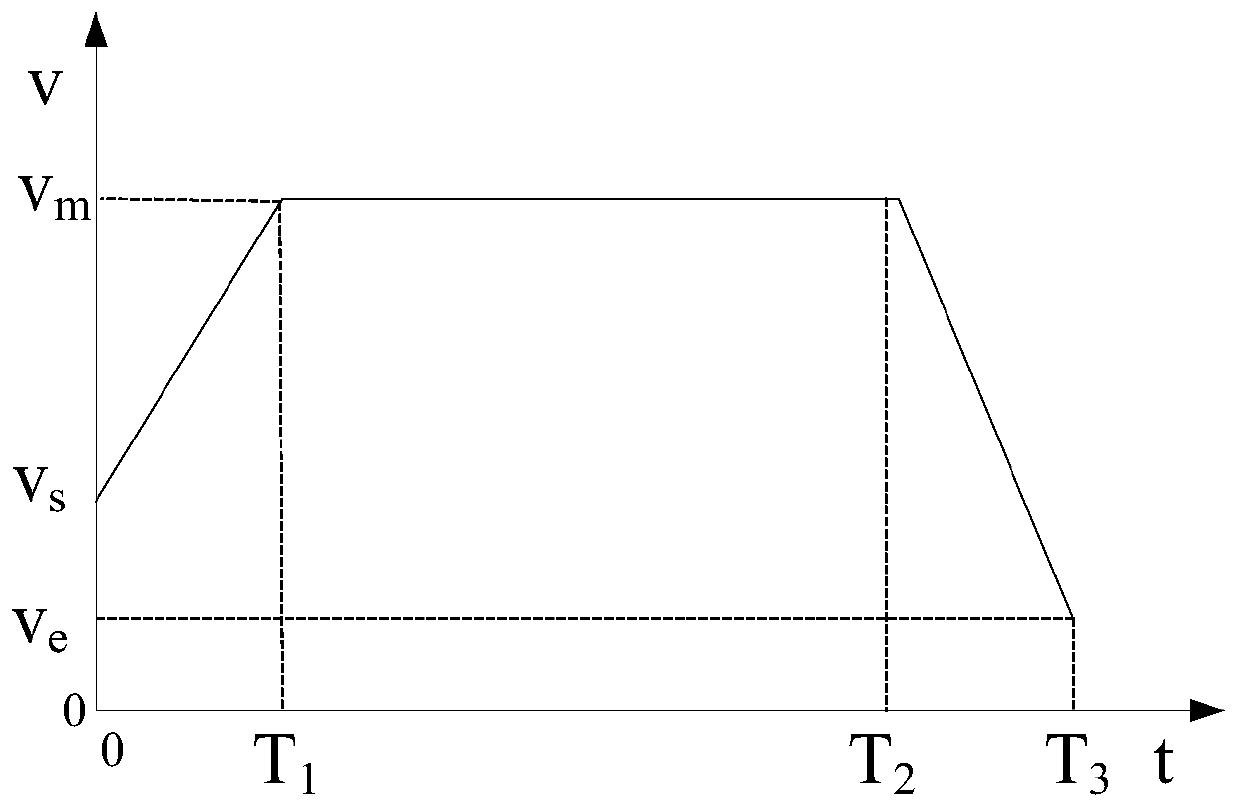
[0049] S1. Determine the trapezoidal velocity trajectory curve of the sports equipment, and set related parameters, so as to solve all unknown parameters;
[0050] S101, setting the parameters of the trapezoidal velocity trajectory curve:
[0051] initial velocity v s =0
[0052] Termination speed v e =0
[0053] Uniform stage speed v m = 2
[0054] Total displacement Sa=20
[0055] acceleration phase acceleration a 1 =0.5
[0056] Acceleration during deceleration a 2 =-0.5
[0057] S102, using the parameters set in step S1 of the embodiment, according to the constraints, to obtain unknown parameters in the process, namely
[0058]
[0059] S2. Determine the corresponding displacement of each execution cycle according to the speed curve;
[0060] S...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap