AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of manipulators and power mechanisms, applied in the field of manipulators, can solve problems such as low work efficiency, high labor intensity, and high labor costs, and achieve the effects of reducing the incidence of accidents, stable sliding, and obvious clamping effects
Pending Publication Date: 2020-09-29
泰州天融科技有限公司
View PDF9 Cites 3 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
At present, there are few manipulators used to clamp cylindrical workpieces. Because cylindrical workpieces are not easy to clamp, the workpieces are prone to fall off during the clamping process, causing accidents. If manual handling and stacking are used, not only the labor intensity is high, Moreover, the work efficiency is low and the labor cost is high, so a manipulator with good clamping effect for clamping cylindrical workpieces is needed.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
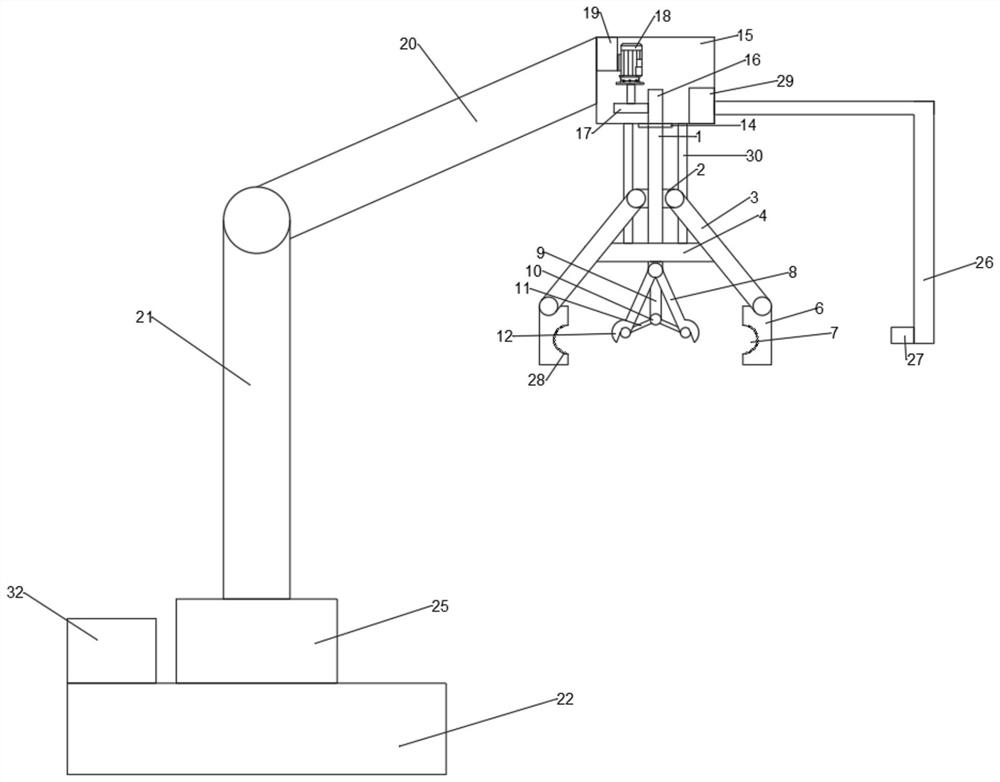
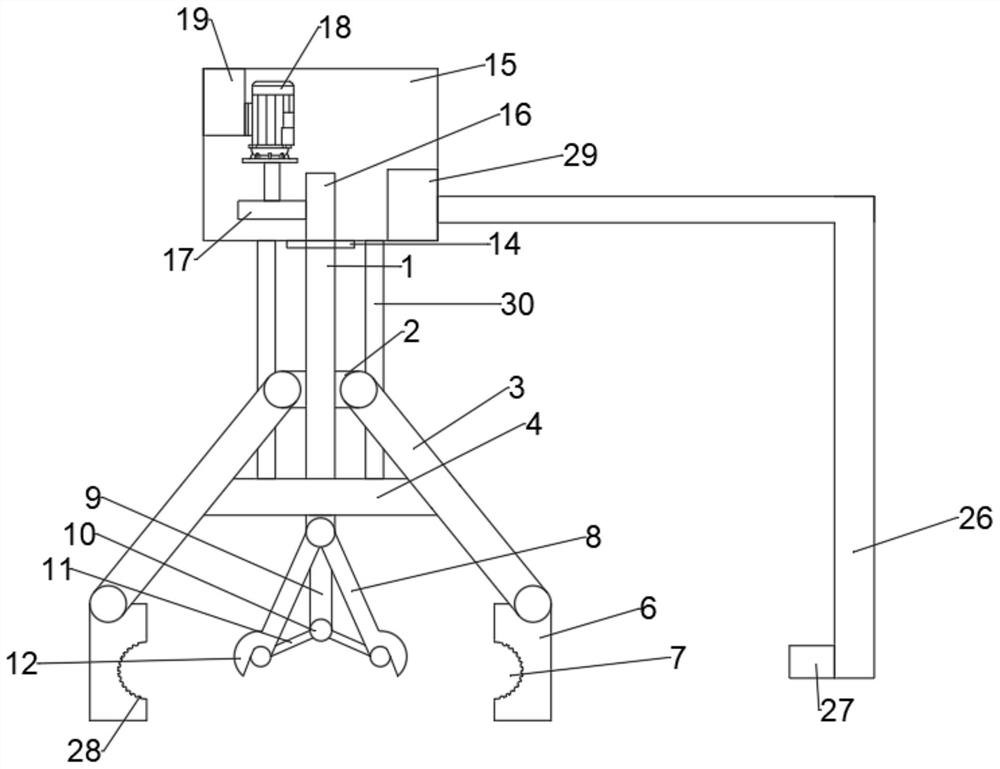
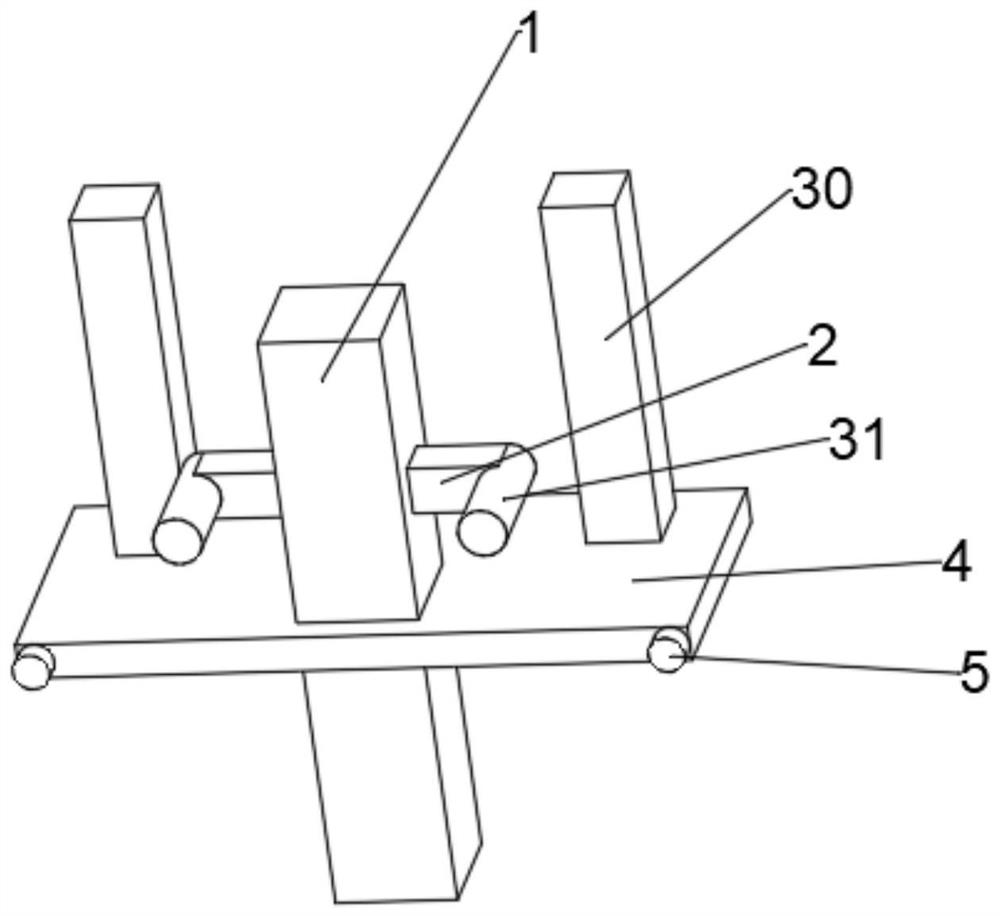
[0034] refer to Figure 1 ~ Figure 4, a manipulator with good clamping effect, comprising a power box 15, a first sliding rod 1 is slidably connected to the bottom of the power box 15, and a bolt on the first sliding rod 1 is connected with a first fixed rod 2, and the first fixed rod 2 Both ends of the left and right sides are bolt-connected with a second protruding platform 31, the front side of the second protruding platform 31 is connected with a second sliding rod 3, and the end of the second sliding rod 3 away from the second protruding platform 31 is bolted with a card. Block 6, the inner side of the block 6 is provided with a card slot 7, the end of the first sliding rod 1 away from the power box 15 is rotatably connected to a swing rod 8, and the end of the swing rod 8 far away from the first slide rod 1 is bolted to an internal block 12 The center of the inner block 12 is rotatably connected with a first connecting rod 11, and the end of the first connecting rod 11 a...
Embodiment 2
[0042] refer to Figure 5 , a manipulator with good clamping effect. Compared with Embodiment 1, the present embodiment is provided with a running mechanism under the bottom plate 22, the running mechanism includes a rolling wheel 23 and a brake plate 24, and the bottom four corners of the bottom plate 22 are bolted. Rolling wheel 23, the bolt on the rolling wheel 23 is connected with brake plate 24, utilizes rolling wheel 23 to make device can move freely, makes it can move in clamping process, plays the effect of carrying, utilizes brake plate 24 to make device When the clamping is not completed, the stability of the device is maintained, the clamping efficiency is improved, and its applicability is increased.
[0043] Working principle: use the rolling wheel 23 to make the device move freely, so that it can move during the clamping process, and play the role of transportation; use the brake plate 24 to keep the device stable when the clamping is not completed, and improve ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a mechanical arm with a good clamping effect. The mechanical arm with the good clamping effect comprises a power box, wherein a first sliding rod is arranged below the power box, a first fixing rod is arranged on the first sliding rod, second protruding tables are arranged at the left end and the right end of the first fixing rod correspondingly, second sliding rods are arranged on the front sides of the second protruding tables, clamping blocks are arranged at the ends, far away from the second protruding tables, of the second sliding rods, swinging rods are arranged at the end, away from the power box, of the first sliding rod, and internal clamping blocks are arranged at the ends, away from the first sliding rod, of the swinging rods. According to the mechanicalarm with the good clamping effect, when the device runs, a power mechanism in the power box is used, so that the first sliding rod moves upwards, the effect of simultaneously clamping the interior andthe exterior of a pipeline is achieved, and the clamping effect is obvious, and meanwhile, the first sliding rod serves as a driving rod, it is guaranteed that under the condition that one of external clamping and internal clamping fails, the clamping effect can be achieved by using the other clamping, the accident rate is reduced, and the device is suitable for large-scale popularization.
Description
technical field [0001] The invention relates to the technical field of manipulators, in particular to a manipulator with good clamping effect. Background technique [0002] A manipulator is an automatic operating device that can imitate certain movement functions of the human hand and arm to grab, carry objects or operate tools according to a fixed program. It is characterized in that it can be programmed to complete various expected operations. It has the advantages of both human beings and robotic machines. [0003] The manipulator is the earliest industrial robot and the first modern robot. It can replace the heavy labor of people to realize the mechanization and automation of production, and can operate in harmful environments to protect personal safety. Therefore, it is widely used in machinery manufacturing, metallurgy, Departments of electronics, light industry and atomic energy. [0004] Manipulator is a high-tech automatic production equipment developed in recent ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More