

Manipulator motion planning method based on bias redefined neural network
A motion planning, neural network technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as operation overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
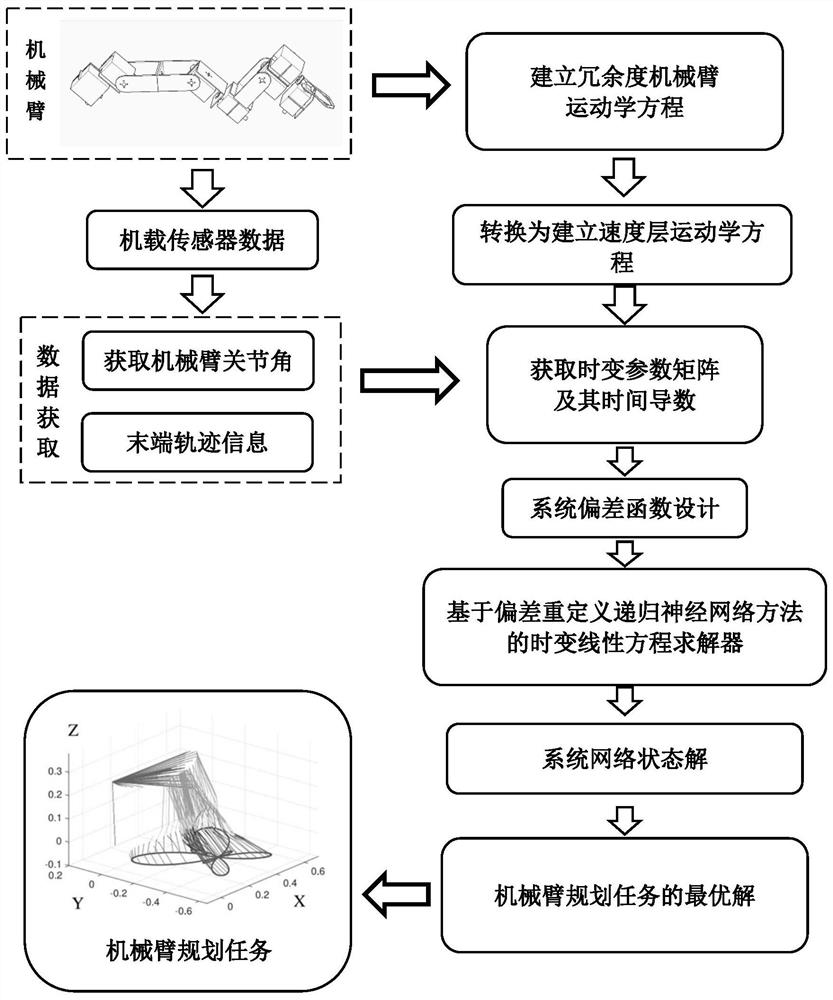
[0054] This embodiment provides a method for motion planning of a manipulator based on a bias-redefined neural network. The flow chart of the method is as follows figure 1 shown, including the following steps:
[0055] (1) According to the parameter relationship between the end trajectory of the redundant manipulator and the joint angle of the manipulator of the redundant manipulator model in the actual system, the kinematic equation of the redundant manipulator is established;
[0056] (2) converting the kinematic equation of the redundant manipulator into a velocity layer kinematic equation, and describing the velocity layer kinematic equation as a smooth time-varying linear equation;
[0057] (3) Obtain the joint angle and end track information of the manipulator through the onboard sensor on the redundant manipulator, construct a time-varying parameter matrix according to the parameters of the manipulator, the joint angle of the manipulator and the end track information, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More