

A motion planning method for underwater robot based on multi-constraint objectives
A robot movement and robot technology, applied in the field of underwater robot motion planning based on multi-constraint goals, can solve a single constraint goal, without considering underwater robots and other problems at the same time, and achieve strong real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
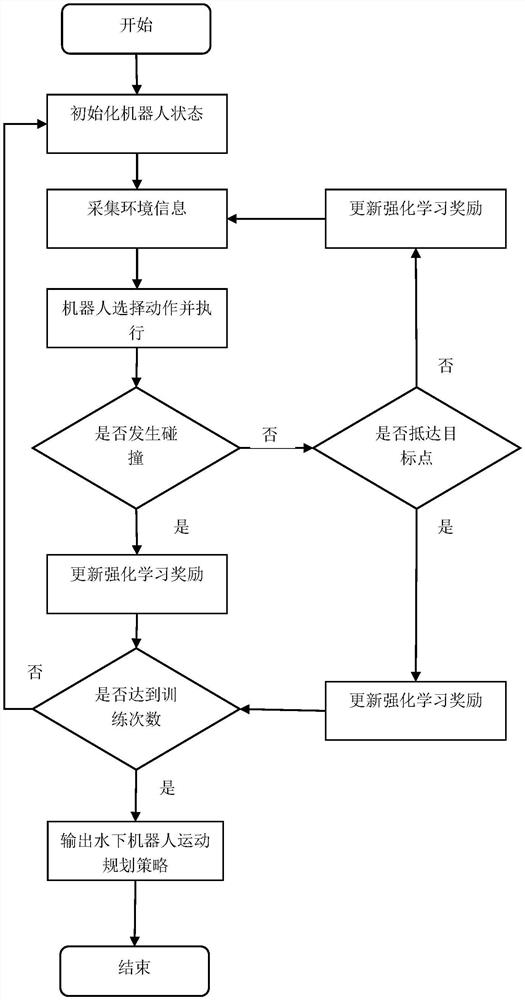
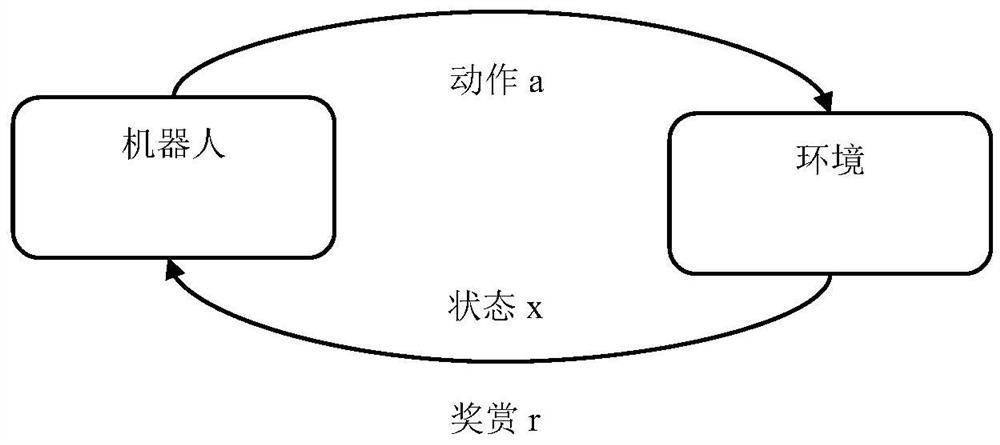
[0044] The invention relates to a motion planning method for an underwater robot, in particular combining multi-objective constraints and a reinforcement learning method for the motion planning of the underwater robot. Model construction stage: transform the robot obstacle avoidance sonar signal and the flow velocity signal of the flow velocity sensor into the current environment; establish a discrete action space based on the dynamic constraints of the underwater robot; establish a reward function with underwater obstacles as constraints; The goal constraints establish the Markov decision process and establish the basis for the algorithm implementation. Training phase: training based on the Q-learning algorithm. In the current environment, actions are executed based on the greedy strategy. Every time the strategy is executed, the strategy is eval...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More