

Bionic flapping wing actuating mechanism capable of realizing flapping and torsion composite motion
A compound motion, flapping and twisting technology, applied in the field of micro bionic flapping wing actuators, can solve the problems of difficult manufacturing, difficult miniaturization, low bionic level, etc., and achieves the effect of compact structure, favorable miniaturization and high degree of miniaturization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
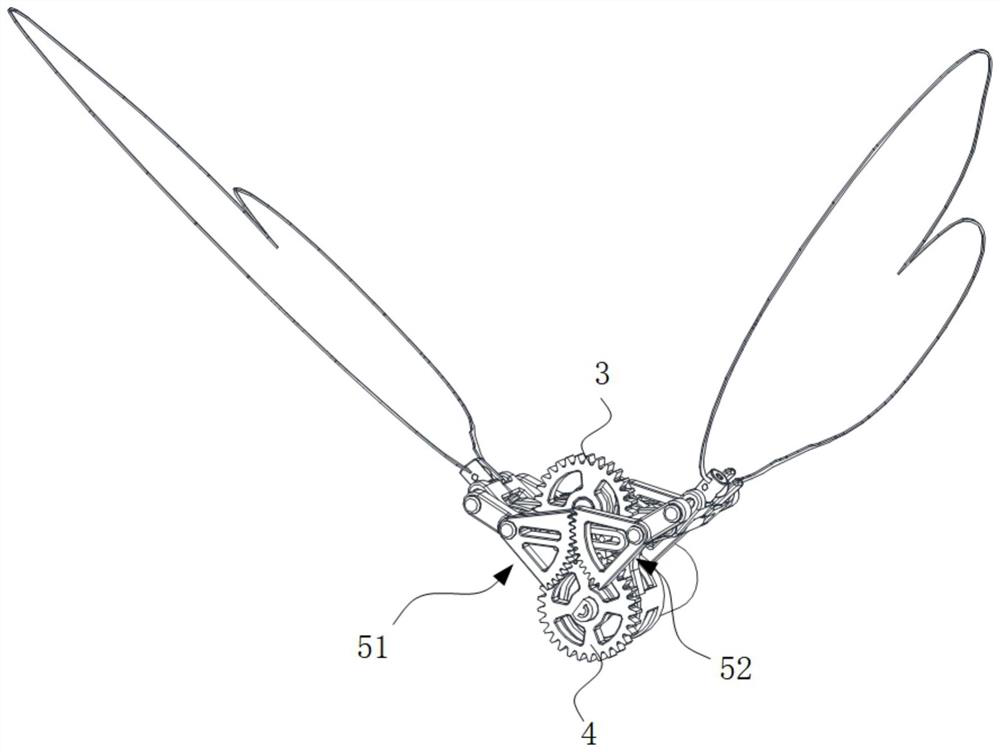
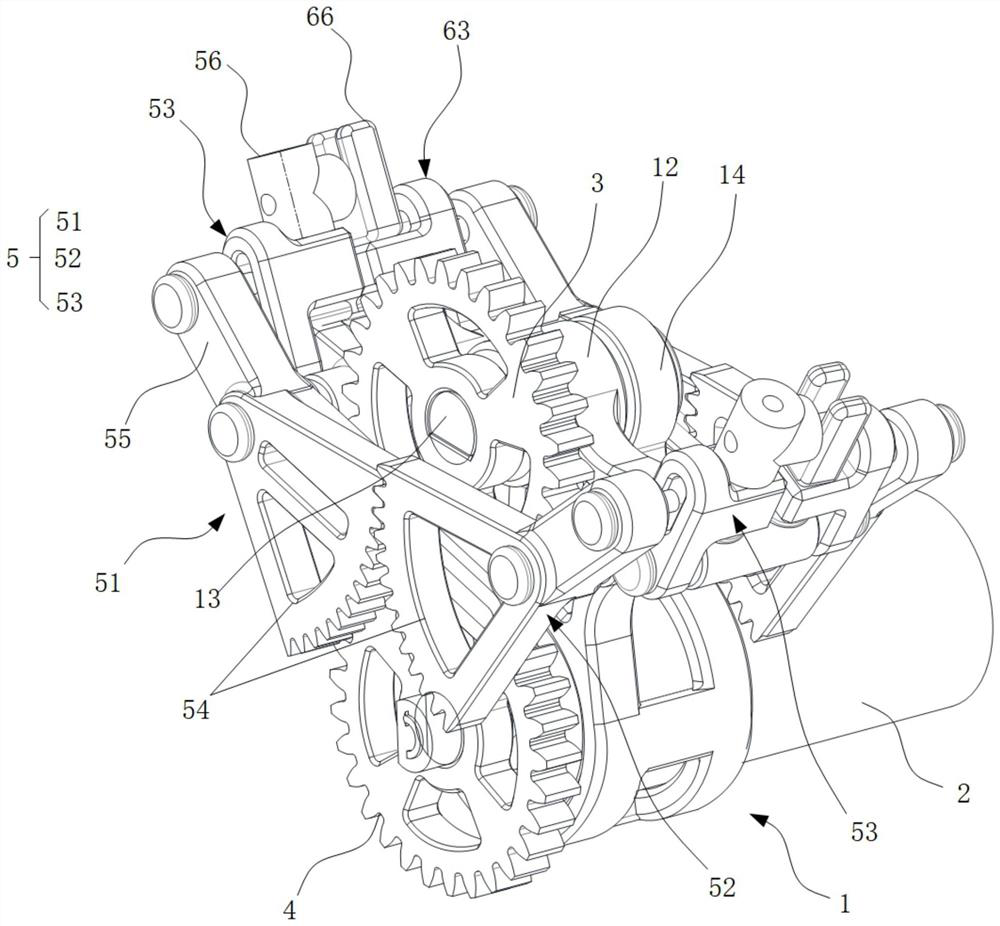
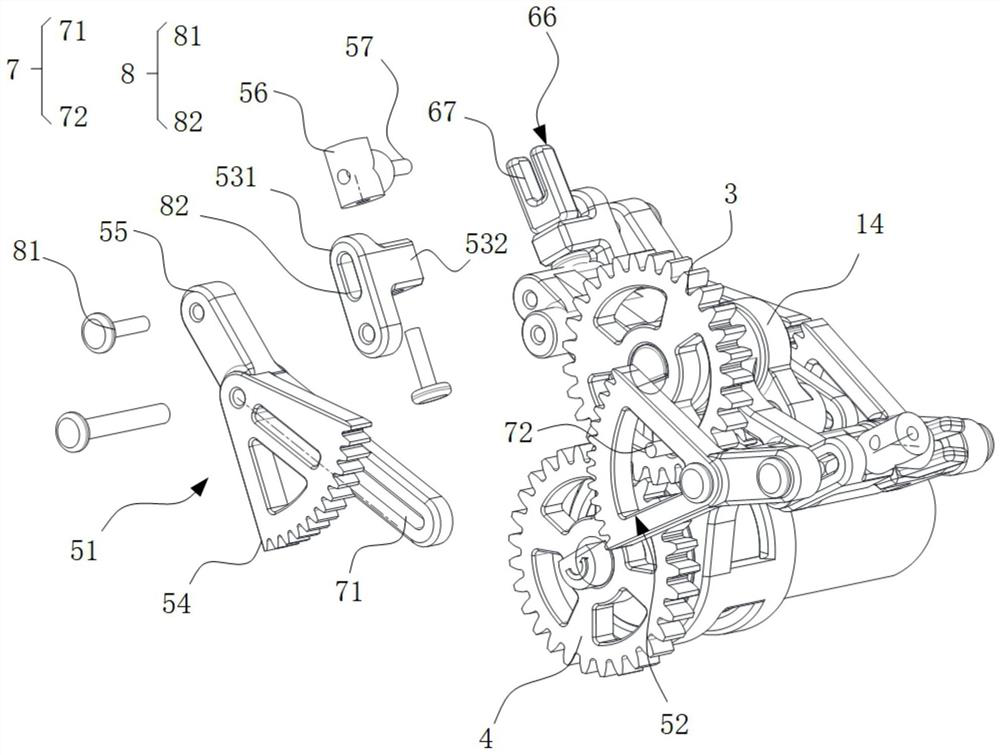
[0020] Such as figure 1 , figure 2 , image 3 shown.
[0021] A bionic flapping-wing actuator that can realize fluttering and twisting compound motions in an embodiment of the present invention includes a frame 1 , a motor 2 , a first gear 3 , a second gear 4 , a main swing mechanism 5 , and an auxiliary swing mechanism 6 .
[0022] The lower part of the frame 1 is provided with a fixed cylinder position 11, the motor 2 is fixedly arranged in the fixed cylinder position 11, the second gear 4 is fixedly connected with the output end of the motor 2, and the upper part of the frame 1 has a swivel seat 12, wherein the rotation is provided with Transmission shaft 13, both sides of transmission shaft 13 protrude from both sides of frame 1 respectively, provide power...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More