

Method, system and device for path planning with continuous curvature
A path planning, curvature continuous technology, applied in the control/adjustment system, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the curvature discontinuity, curvature conversion formula has not been derived, inconsistent And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
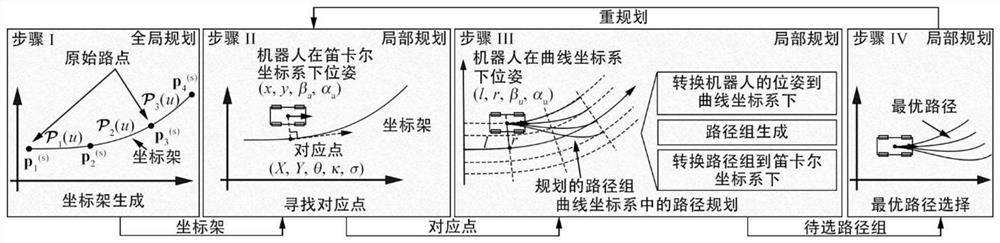
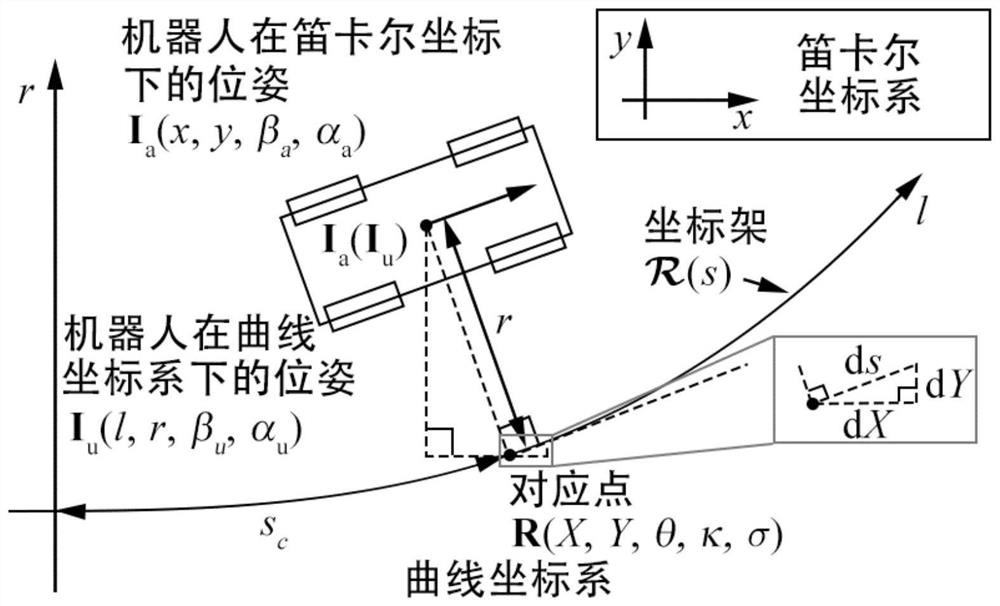
[0033] The framework of the planning method proposed by the present invention is as follows figure 1 As shown, it is divided into four steps. The first step is global planning, which generates a natural parametric curve with a continuous rate of curvature change given the original waypoints. The coordinate frame used for local planning can be defined by this natural parametric curve. The last three steps are all local planning. The second step is to give the pose I of the robot Cartesian coordinate system a =(x,y,β a ,α a ) after (x, y, β in the tuple a and alpha aare respectively abscissa, ordinate, orientation and curvature), find out its corresponding point R=(X, Y, θ, κ, σ) in the coordinate frame, and each dimension of the tuple is: X-abscissa , Y-ordinate, θ-orientation, κ-curvature, σ represents the rate of curvature change, and the third step is path planning in the curvilinear coordinate system, which includes the following parts: First, according to I a and R...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More