

Parking method and system for unmanned vehicle in mining area
A technology for unmanned vehicles and parking methods, applied in the field of vehicle driving in mining areas, can solve problems such as collision risk and unmanned vehicle loading.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
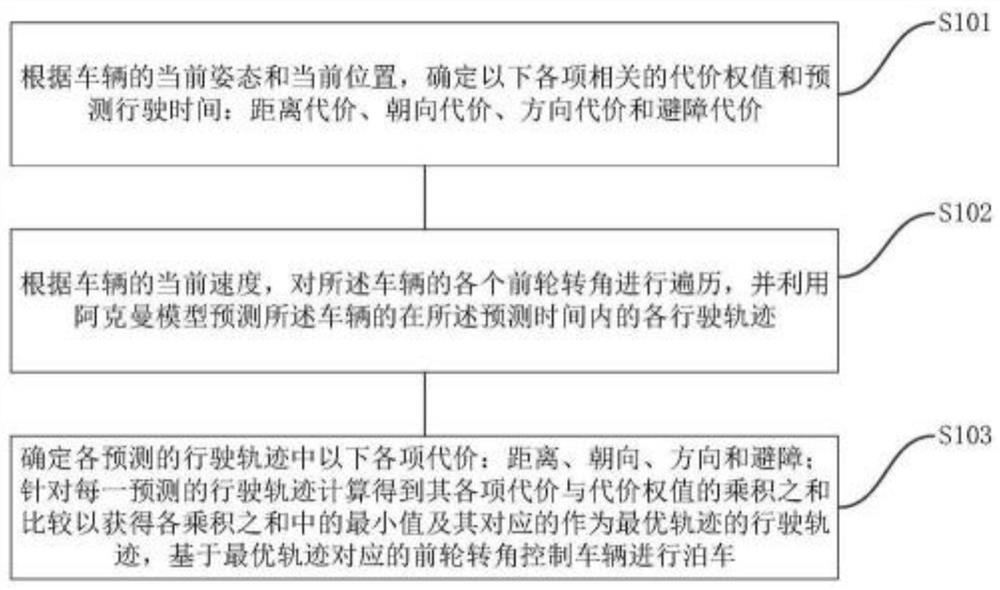
[0021] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention. figure 1 It is a flow chart of a parking method for an unmanned vehicle in a mining area of the present invention, such as figure 1 As shown, the parking method of the unmanned vehicle in the mining area includes:
[0022] S101, according to the current attitude and current position of the vehicle, determine the following related cost weights and predicted travel time: distance cost, orientation cost, direction cost and obstacle avoidance cost.
[0023] Wherein, the current attitude includes data such as each front wheel angle of the vehicle, the steering angle of the vehicle, and the length of the vehicle body, and the current position is the address of the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More