

A method and device for group management and scheduling of unmanned vehicles in a closed area
An unmanned vehicle and cluster management technology, which is applied in the field of cluster management and scheduling of unmanned vehicles in closed areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
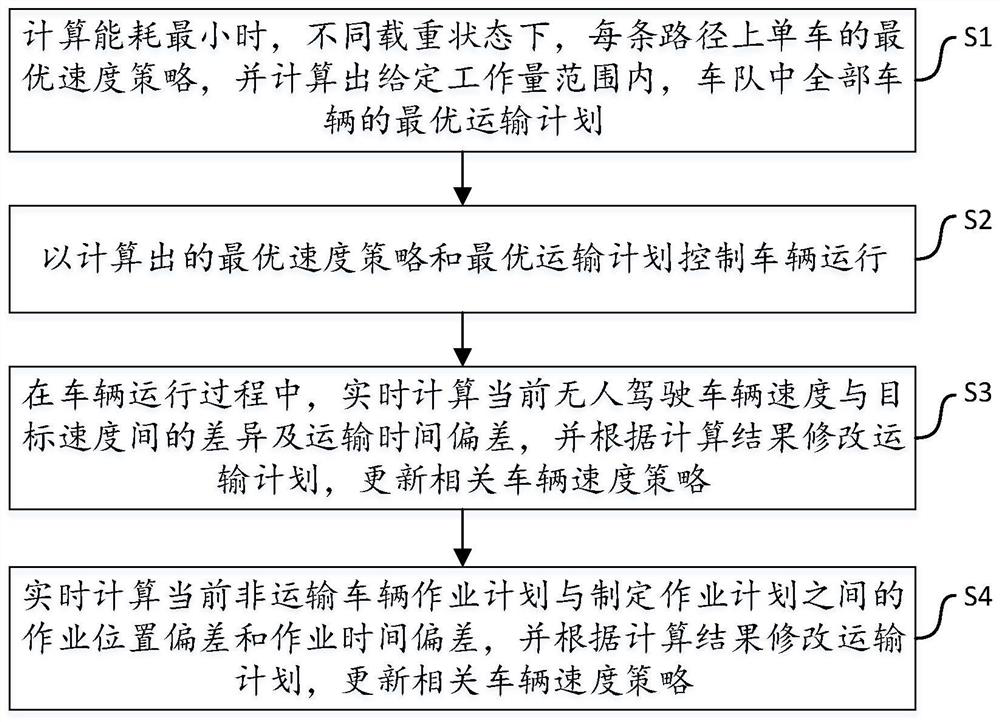
[0037] The present embodiment provides a closed area unmanned vehicle cluster management scheduling method, the method may be implemented by an electronic device, the electronic device may be a terminal or a server. The closed area unmanned vehicle cluster management scheduling method of the execution process such as Figure 1 shown, including the following steps:
[0038] S1, calculate the optimal speed strategy of bicycles on each path under different load states with the smallest energy consumption, and calculate the optimal transportation plan for all vehicles in the fleet within a given workload range;
[0039] S2, to calculate the optimal speed strategy and optimal transportation plan to control the operation of the vehicle;
[0040] S3, in the process of vehicle operation, real-time calculation of the difference between the current driverless vehicle speed and the target speed and the deviation of the transportation time, and modify the transportation plan according to the c...
no. 2 example
[0069] The present embodiment provides a closed area unmanned vehicle cluster management scheduling device, the closed area unmanned vehicle cluster management scheduling device comprises the following modules:
[0070] Optimal speed strategy and optimal transportation plan solving module, which is used to calculate the optimal speed strategy of bicycles on each path with the smallest energy consumption and different load states, and calculates the optimal transportation plan for all vehicles in the fleet within the given workload range;
[0071] Operation control module, used to control the operation of the vehicle with the optimal speed strategy and the optimal transportation plan solving module calculated by the optimal speed strategy and the optimal transportation plan solution module;
[0072] Real-time tuning module for:
[0073] During the operation of the vehicle, the difference between the current driverless vehicle speed and the target speed and the deviation of the tran...
no. 3 example
[0077]The present embodiment provides an electronic device comprising a processor and memory; Wherein, there is at least one instruction stored in the memory, the instruction is loaded by the processor and executed, to achieve the method of the first embodiment.
[0078] The electronic device may produce relatively large differences due to different configurations or performance, may include one or more processors (central processing units, CPU) and one or more memory, wherein the memory stores at least one instruction, the instruction is loaded by the processor and executes the above method.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More