

Natural language instruction disambiguation method and system oriented to mechanical arm grabbing
A natural language and robotic arm technology, applied in natural language data processing, manipulators, neural learning methods, etc., can solve problems such as semantic disambiguation is difficult to achieve, and the grasping task of the robotic arm cannot be correctly guided.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
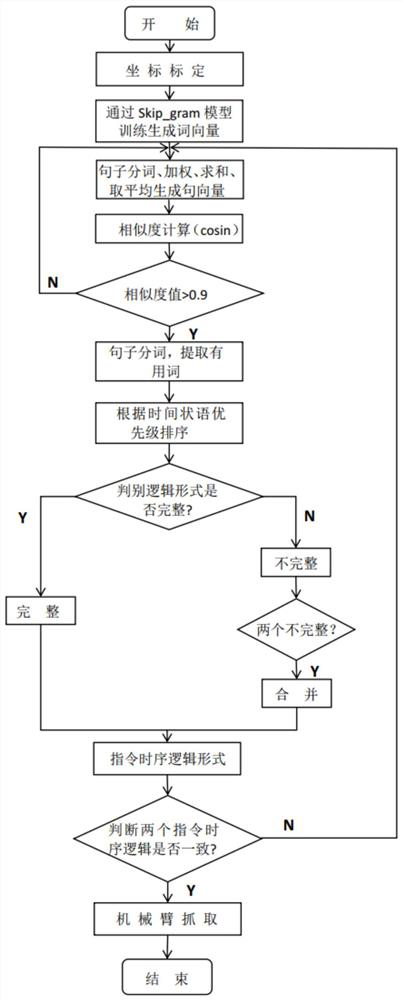
[0052] refer tofigure 1 , Embodiments of the present invention provides a natural language instruction fetch oriented manipulator disambiguation method, comprising the steps of:
[0053] S1: the coordinates of the calibration, the calibration object gripping position coordinates of each region and the releasing region;
[0054] S2: word vector model, after Corpus word processing, first take Skip-gram model and one_hot coding method, and then get the word vector by the neural network training;
[0055] S3: vector model sentence, the sentence is processed to generate vector sentence word model vector;
[0056] S4: Sentence semantic similarity calculation, the similarity between two vectors is calculated by the loss function periods (cosin), setting the threshold value of 0.9, a preliminary determination semantic consistency between the two sentences; If the similarity value is greater than 0.9, proceeds to step S5; If the similarity value is less than 0.9, then step S2;
[0057] S5:...
Embodiment 2
[0088] In order to fully demonstrate the effectiveness of the present invention, the present embodiment has collected 200 of natural language instructions with temporal logic is verified, i.e., 100 pairs of different sequential logic (same semantics) of the natural language instructions. The natural language instructions into 4 experimental groups, the four groups of language instruction to operate according to the method of the present invention, wherein the test indicator comprises three parts: the sentence semantic similarity calculation accuracy, sentence acquired sequential logic accuracy, grasping manipulator take the task success rate. The experimental data shown in Table 2:
[0089]
[0090] Table 2
[0091] From the above table shows that the sentence semantic similarity calculation accuracy, sentence sequential logic acquisition of accuracy, the robotic arm grab mission success rate of over 90%, effectively guide the robotic arm to complete the crawl task.
Embodiment 3
[0093] Based on the same inventive concept, the embodiment of the present invention provides a natural language command disambiguation system that is grasped by a robotic arm, which solves the problem of a natural language command disambiguation method of the mechanical arm. The depends is not described again.
[0094] A natural language command disagressive system that is crawling toward a robotic arm, including:
[0095] Calibration unit, calibration object grabs the area and the point position coordinates of the release area;
[0096] Word vector model, after tentieratively processing of corpus, through the word prediction model training to generate word vector;
[0097] Instrument model, process the input sentence, generate the corresponding sentence based on the word vector model;
[0098] The similarity calculation unit, calculates the similarity between the two sentences by the loss function, and initially discriminates the semantic consistency between the two sentences. If t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More